
- Descrizione :
Questo è un set di dati di stima della posa, costituito da forme 3D simmetriche in cui più orientamenti sono visivamente indistinguibili. La sfida è prevedere tutti gli orientamenti equivalenti quando un solo orientamento è associato a ciascuna immagine durante l'addestramento (come lo scenario per la maggior parte dei set di dati di stima della posa). Contrariamente alla maggior parte dei set di dati di stima della posa, è disponibile per la valutazione l'intero set di orientamenti equivalenti.
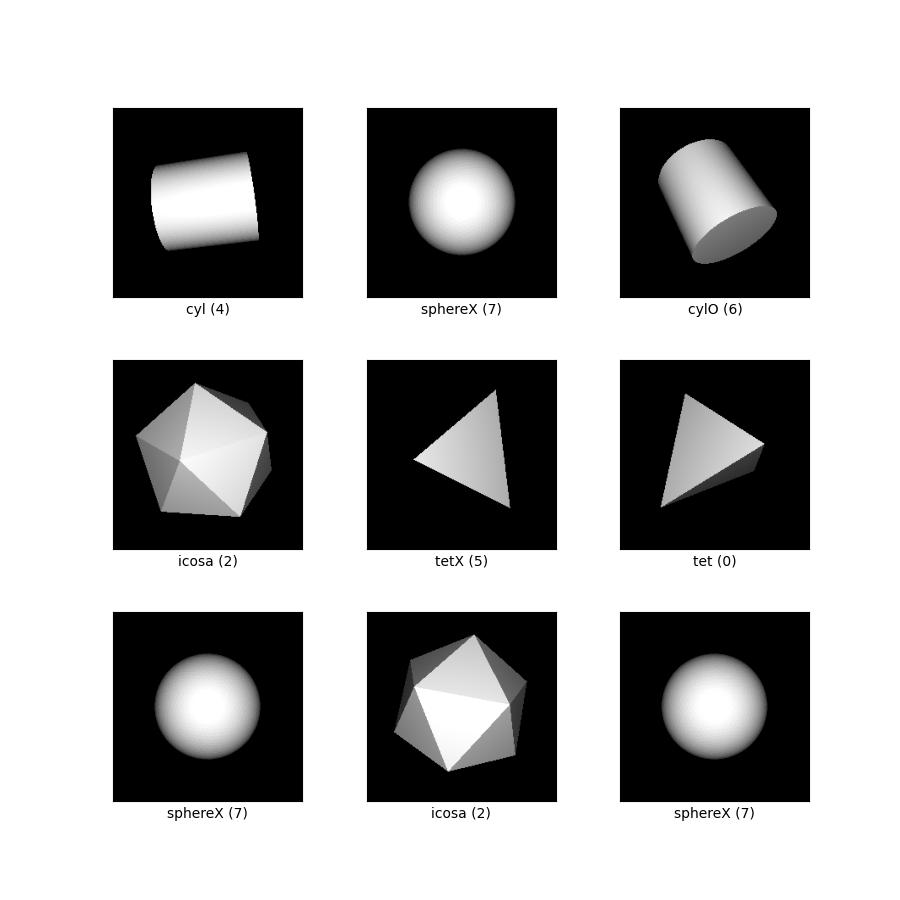
Ci sono otto forme in totale, ciascuna resa da 50.000 punti di vista distribuiti uniformemente in modo casuale nell'intero spazio delle rotazioni 3D. Cinque delle forme sono prive di caratteristiche: tetraedro, cubo, icosaedro, cono e cilindro. Di questi, i tre solidi platonici (tetraedro, cubo, icosaedro) sono annotati rispettivamente con le loro simmetrie discrete di 12, 24 e 60 volte. Il cono e il cilindro sono annotati con le loro simmetrie continue discretizzate a intervalli di 1 grado. Queste simmetrie sono fornite per la valutazione; la supervisione prevista è solo una singola rotazione con ciascuna immagine.
Le restanti tre forme sono contrassegnate da una caratteristica distintiva. C'è un tetraedro con una faccia di colore rosso, un cilindro con un punto decentrato e una sfera con una X ricoperta da un punto. Visibile o meno il tratto distintivo, lo spazio dei possibili orientamenti è ridotto. Non forniamo l'insieme di rotazioni equivalenti per queste forme.
Ogni esempio contiene di
- l'immagine RGB 224x224
un indice di forma in modo che il set di dati possa essere filtrato per forma.
Gli indici corrispondono a:- 0 = tetraedro
- 1 = cubo
- 2 = icosaedro
- 3 = cono
- 4 = cilindro
- 5 = tetraedro contrassegnato
- 6 = cilindro contrassegnato
- 7 = sfera marcata
la rotazione utilizzata nel processo di rendering, rappresentata come una matrice di rotazione 3x3
l'insieme delle rotazioni equivalenti note sotto simmetria, per la valutazione.
Nel caso delle tre forme contrassegnate, questa è solo la rotazione del rendering.
Documentazione aggiuntiva : Esplora documenti con codice
Pagina iniziale : https://implicit-pdf.github.io
Codice sorgente :
tfds.datasets.symmetric_solids.BuilderVersioni :
-
1.0.0(impostazione predefinita): versione iniziale.
-
Dimensione del download :
3.10 GiBDimensione del set di dati:
3.94 GiBCache automatica ( documentazione ): No
Divisioni :
| Diviso | Esempi |
|---|---|
'test' | 40.000 |
'train' | 360.000 |
- Struttura delle caratteristiche :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Documentazione delle funzionalità :
| Caratteristica | Classe | Forma | Tipo D | Descrizione |
|---|---|---|---|---|
| CaratteristicheDict | ||||
| Immagine | Immagine | (224, 224, 3) | uint8 | |
| etichetta_forma | ClassLabel | int64 | ||
| rotazione | Tensore | (3, 3) | galleggiante32 | |
| rotazioni_equivalente | Tensore | (Nessuno, 3, 3) | galleggiante32 |
Tasti supervisionati (Vedi
as_superviseddoc ):('image', 'rotation')Figura ( tfds.show_examples ):
- Esempi ( tfds.as_dataframe ):
- Citazione :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}