
 GitHub でソースを表示 GitHub でソースを表示 |
TensorFlow Probability(TFP)は、確率論的推論と統計分析のためのライブラリであり、JAX でも使用できるようになりました。JAX は構成可能な関数変換に基づく高速な数値計算のためのライブラリです。
JAX では、多くの TFP ユーザーが使い慣れている TFP の抽象化と API を維持しながら、通常の TFP の最も便利な機能の多くがサポートされています。
セットアップ
JAX で TFP を使用する場合は TensorFlow には依存しません。この Colab から TensorFlow を完全にアンインストールしましょう。
pip uninstall tensorflow -y -qTFP の最新のナイトリービルドを使用して、JAX に TFP をインストールします。
pip install -Uq tfp-nightly[jax] > /dev/nullいくつかの便利な Python ライブラリをインポートします。
import matplotlib.pyplot as plt
import numpy as np
import seaborn as sns
from sklearn import datasets
sns.set(style='white')
/usr/local/lib/python3.6/dist-packages/statsmodels/tools/_testing.py:19: FutureWarning: pandas.util.testing is deprecated. Use the functions in the public API at pandas.testing instead. import pandas.util.testing as tm
いくつかの基本的な JAX 機能もインポートします。
import jax.numpy as jnp
from jax import grad
from jax import jit
from jax import random
from jax import value_and_grad
from jax import vmap
JAX での TFP のインポート
JAX で TFP を使用するには、jax "サブストレート" をインポートして、通常の tfp と同じように使用します。
from tensorflow_probability.substrates import jax as tfp
tfd = tfp.distributions
tfb = tfp.bijectors
tfpk = tfp.math.psd_kernels
デモ: ベイズロジスティック回帰
JAX バックエンドで何ができるかを示すために、古典的な Iris データセットに適用されるベイズロジスティック回帰を実装します。
まず、Iris データセットをインポートして、いくつかのメタデータを抽出します。
iris = datasets.load_iris()
features, labels = iris['data'], iris['target']
num_features = features.shape[-1]
num_classes = len(iris.target_names)
tfd.JointDistributionCoroutine を使用してモデルを定義します。重みとバイアス項の両方を標準正規事前分布し、サンプリングされたラベルをデータに固定する target_log_prob 関数を記述します。
Root = tfd.JointDistributionCoroutine.Root
def model():
w = yield Root(tfd.Sample(tfd.Normal(0., 1.),
sample_shape=(num_features, num_classes)))
b = yield Root(
tfd.Sample(tfd.Normal(0., 1.), sample_shape=(num_classes,)))
logits = jnp.dot(features, w) + b
yield tfd.Independent(tfd.Categorical(logits=logits),
reinterpreted_batch_ndims=1)
dist = tfd.JointDistributionCoroutine(model)
def target_log_prob(*params):
return dist.log_prob(params + (labels,))
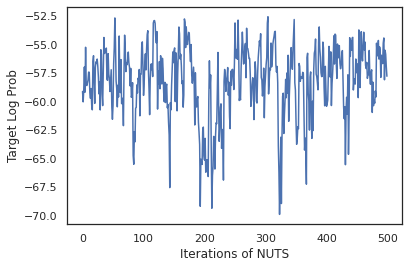
dist からサンプリングして、MCMC の初期状態を生成します。次に、ランダムキーと初期状態を受け取り、No-U-Turn-Sampler (NUTS) から 500 個のサンプルを生成する関数を定義します。jit のような JAX 変換を使用して、XLA を使用して NUTS サンプラーをコンパイルできることに注意してください。
init_key, sample_key = random.split(random.PRNGKey(0))
init_params = tuple(dist.sample(seed=init_key)[:-1])
@jit
def run_chain(key, state):
kernel = tfp.mcmc.NoUTurnSampler(target_log_prob, 1e-3)
return tfp.mcmc.sample_chain(500,
current_state=state,
kernel=kernel,
trace_fn=lambda _, results: results.target_log_prob,
num_burnin_steps=500,
seed=key)
states, log_probs = run_chain(sample_key, init_params)
plt.figure()
plt.plot(log_probs)
plt.ylabel('Target Log Prob')
plt.xlabel('Iterations of NUTS')
plt.show()
サンプルを使用して、重みの各セットの予測確率を平均することにより、ベイズモデル平均化 (BMA) を実行します。
最初に、特定のパラメータのセットに対して各クラスの確率を生成する関数を作成します。dist.sample_distributions を使用して、モデルの最終的な分布を取得できます。
def classifier_probs(params):
dists, _ = dist.sample_distributions(seed=random.PRNGKey(0),
value=params + (None,))
return dists[-1].distribution.probs_parameter()
サンプルのセットに対して vmap(classifier_probs) を実行して、各サンプルの予測クラス確率を取得します。次に、各サンプルの平均精度とベイズモデル平均化からの精度を計算します。
all_probs = jit(vmap(classifier_probs))(states)
print('Average accuracy:', jnp.mean(all_probs.argmax(axis=-1) == labels))
print('BMA accuracy:', jnp.mean(all_probs.mean(axis=0).argmax(axis=-1) == labels))
Average accuracy: 0.96952 BMA accuracy: 0.97999996
BMA はエラー率をほぼ 3 分の 1 に減らしました!
基礎
JAX 上の TFP には TF と同じ API があり、tf.Tensor などの TF オブジェクトを受け入れる代わりに、JAX アナログを受け入れます。たとえば、tf.Tensor が以前に入力として使用されていた場合、API は JAX DeviceArray を想定するようになりました。TFP メソッドは tf.Tensor を返す代わりに、DeviceArray を返します。JAX 上の TFP は、DeviceArray のリストやディクショナリなど、JAX オブジェクトのネストされた構造でも機能します。
分布
TFP の分布のほとんどは、JAX でサポートされています。これは対応する TF の分布と非常によく似たセマンティクスを持ちます。また、JAX Pytrees として登録されているため、JAX 変換された関数の入力および出力になります。
基本的な分布
分布の log_prob メソッドも同じように機能します。
dist = tfd.Normal(0., 1.)
print(dist.log_prob(0.))
-0.9189385
分布からサンプリングするには、seed キーワード引数として PRNGKey(または整数のリスト)を明示的に渡す必要があります。シードを明示的に渡さないと、エラーがスローされます。
tfd.Normal(0., 1.).sample(seed=random.PRNGKey(0))
DeviceArray(-0.20584226, dtype=float32)
分布の形状セマンティクスは JAX でも同じです。ここで、分布にはそれぞれ event_shape と batch_shape があり、多くのサンプルをドローすると、さらに sample_shape 次元が追加されます。
たとえば、ベクトルパラメータを持つ tfd.MultivariateNormalDiag は、ベクトルイベント形状と空のバッチ形状を持ちます。
dist = tfd.MultivariateNormalDiag(
loc=jnp.zeros(5),
scale_diag=jnp.ones(5)
)
print('Event shape:', dist.event_shape)
print('Batch shape:', dist.batch_shape)
Event shape: (5,) Batch shape: ()
一方、ベクトルでパラメーター化された tfd.Normal は、スカラーイベント形状とベクトルバッチ形状になります。
dist = tfd.Normal(
loc=jnp.ones(5),
scale=jnp.ones(5),
)
print('Event shape:', dist.event_shape)
print('Batch shape:', dist.batch_shape)
Event shape: () Batch shape: (5,)
サンプルの log_prob を取得するセマンティクスは、JAX でも同じように機能します。
dist = tfd.Normal(jnp.zeros(5), jnp.ones(5))
s = dist.sample(sample_shape=(10, 2), seed=random.PRNGKey(0))
print(dist.log_prob(s).shape)
dist = tfd.Independent(tfd.Normal(jnp.zeros(5), jnp.ones(5)), 1)
s = dist.sample(sample_shape=(10, 2), seed=random.PRNGKey(0))
print(dist.log_prob(s).shape)
(10, 2, 5) (10, 2)
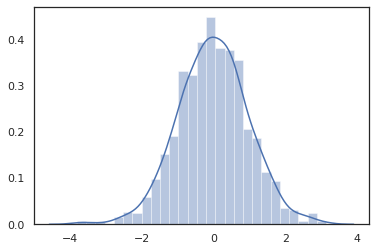
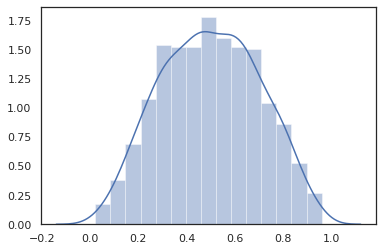
JAX DeviceArray は NumPy や Matplotlib などのライブラリと互換性があるため、サンプルをプロット関数に直接フィードできます。
sns.distplot(tfd.Normal(0., 1.).sample(1000, seed=random.PRNGKey(0)))
plt.show()
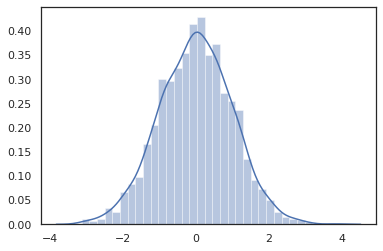
Distribution メソッドは JAX 変換と互換性があります。
sns.distplot(jit(vmap(lambda key: tfd.Normal(0., 1.).sample(seed=key)))(
random.split(random.PRNGKey(0), 2000)))
plt.show()
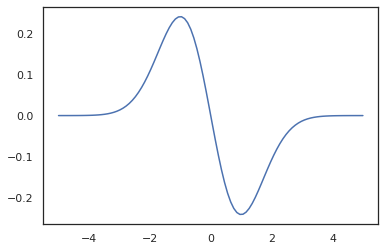
x = jnp.linspace(-5., 5., 100)
plt.plot(x, jit(vmap(grad(tfd.Normal(0., 1.).prob)))(x))
plt.show()
TFP 分布は JAX pytree ノードとして登録されているため、分布を入力または出力として関数を記述し、jit を使用して変換できますが、vmap 関数の引数としてはまだサポートされていません。
@jit
def random_distribution(key):
loc_key, scale_key = random.split(key)
loc, log_scale = random.normal(loc_key), random.normal(scale_key)
return tfd.Normal(loc, jnp.exp(log_scale))
random_dist = random_distribution(random.PRNGKey(0))
print(random_dist.mean(), random_dist.variance())
0.14389051 0.081832744
変換された分布
変換された分布、つまりサンプルが Bijector を通過する分布も、そのままで機能します(バイジェクターも機能します。以下を参照してください)。
dist = tfd.TransformedDistribution(
tfd.Normal(0., 1.),
tfb.Sigmoid()
)
sns.distplot(dist.sample(1000, seed=random.PRNGKey(0)))
plt.show()
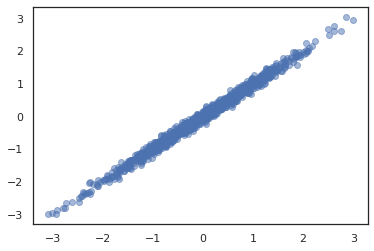
同時分布
TFP はコンポーネントの分布を複数の確率変数上の単一の分布に結合できるように JointDistribution を提供しています。現在、TFP は 3 つのコアバリアント (JointDistributionSequential、JointDistributionNamed、および JointDistributionCoroutine) を提供しており、これらはすべて JAX でサポートされています。AutoBatched バリアントもすべてサポートされています。
dist = tfd.JointDistributionSequential([
tfd.Normal(0., 1.),
lambda x: tfd.Normal(x, 1e-1)
])
plt.scatter(*dist.sample(1000, seed=random.PRNGKey(0)), alpha=0.5)
plt.show()
joint = tfd.JointDistributionNamed(dict(
e= tfd.Exponential(rate=1.),
n= tfd.Normal(loc=0., scale=2.),
m=lambda n, e: tfd.Normal(loc=n, scale=e),
x=lambda m: tfd.Sample(tfd.Bernoulli(logits=m), 12),
))
joint.sample(seed=random.PRNGKey(0))
{'e': DeviceArray(3.376818, dtype=float32),
'm': DeviceArray(2.5449684, dtype=float32),
'n': DeviceArray(-0.6027825, dtype=float32),
'x': DeviceArray([1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], dtype=int32)}
Root = tfd.JointDistributionCoroutine.Root
def model():
e = yield Root(tfd.Exponential(rate=1.))
n = yield Root(tfd.Normal(loc=0, scale=2.))
m = yield tfd.Normal(loc=n, scale=e)
x = yield tfd.Sample(tfd.Bernoulli(logits=m), 12)
joint = tfd.JointDistributionCoroutine(model)
joint.sample(seed=random.PRNGKey(0))
StructTuple(var0=DeviceArray(0.17315261, dtype=float32), var1=DeviceArray(-3.290489, dtype=float32), var2=DeviceArray(-3.1949058, dtype=float32), var3=DeviceArray([0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], dtype=int32))
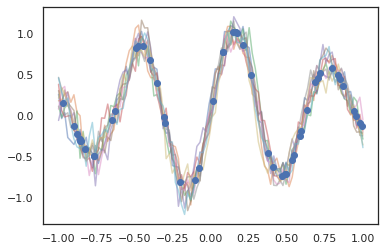
その他の分布
ガウス過程は JAX モードでも機能します。
k1, k2, k3 = random.split(random.PRNGKey(0), 3)
observation_noise_variance = 0.01
f = lambda x: jnp.sin(10*x[..., 0]) * jnp.exp(-x[..., 0]**2)
observation_index_points = random.uniform(
k1, [50], minval=-1.,maxval= 1.)[..., jnp.newaxis]
observations = f(observation_index_points) + tfd.Normal(
loc=0., scale=jnp.sqrt(observation_noise_variance)).sample(seed=k2)
index_points = jnp.linspace(-1., 1., 100)[..., jnp.newaxis]
kernel = tfpk.ExponentiatedQuadratic(length_scale=0.1)
gprm = tfd.GaussianProcessRegressionModel(
kernel=kernel,
index_points=index_points,
observation_index_points=observation_index_points,
observations=observations,
observation_noise_variance=observation_noise_variance)
samples = gprm.sample(10, seed=k3)
for i in range(10):
plt.plot(index_points, samples[i], alpha=0.5)
plt.plot(observation_index_points, observations, marker='o', linestyle='')
plt.show()
隠れマルコフモデルもサポートされています。
initial_distribution = tfd.Categorical(probs=[0.8, 0.2])
transition_distribution = tfd.Categorical(probs=[[0.7, 0.3],
[0.2, 0.8]])
observation_distribution = tfd.Normal(loc=[0., 15.], scale=[5., 10.])
model = tfd.HiddenMarkovModel(
initial_distribution=initial_distribution,
transition_distribution=transition_distribution,
observation_distribution=observation_distribution,
num_steps=7)
print(model.mean())
print(model.log_prob(jnp.zeros(7)))
print(model.sample(seed=random.PRNGKey(0)))
[3. 6. 7.5 8.249999 8.625001 8.812501 8.90625 ] /usr/local/lib/python3.6/dist-packages/tensorflow_probability/substrates/jax/distributions/hidden_markov_model.py:483: UserWarning: HiddenMarkovModel.log_prob in TFP versions < 0.12.0 had a bug in which the transition model was applied prior to the initial step. This bug has been fixed. You may observe a slight change in behavior. 'HiddenMarkovModel.log_prob in TFP versions < 0.12.0 had a bug ' -19.855635 [ 1.3641367 0.505798 1.3626463 3.6541772 2.272286 15.10309 22.794212 ]
PixelCNN のようないくつかの分布は、TensorFlow または XLA の非互換性に厳密に依存しているため、まだサポートされていません。
バイジェクター
現在、ほとんどの TFP バイジェクターが JAX でサポートされています。
tfb.Exp().inverse(1.)
DeviceArray(0., dtype=float32)
bij = tfb.Shift(1.)(tfb.Scale(3.))
print(bij.forward(jnp.ones(5)))
print(bij.inverse(jnp.ones(5)))
[4. 4. 4. 4. 4.] [0. 0. 0. 0. 0.]
b = tfb.FillScaleTriL(diag_bijector=tfb.Exp(), diag_shift=None)
print(b.forward(x=[0., 0., 0.]))
print(b.inverse(y=[[1., 0], [.5, 2]]))
[[1. 0.] [0. 1.]] [0.6931472 0.5 0. ]
b = tfb.Chain([tfb.Exp(), tfb.Softplus()])
# or:
# b = tfb.Exp()(tfb.Softplus())
print(b.forward(-jnp.ones(5)))
[1.3678794 1.3678794 1.3678794 1.3678794 1.3678794]
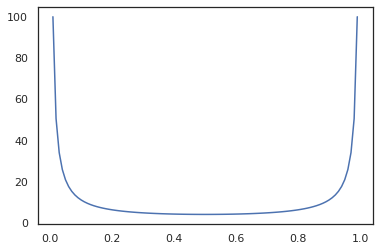
バイジェクターは、jit、grad および vmap などの JAX 変換と互換性があります。
jit(vmap(tfb.Exp().inverse))(jnp.arange(4.))
DeviceArray([ -inf, 0. , 0.6931472, 1.0986123], dtype=float32)
x = jnp.linspace(0., 1., 100)
plt.plot(x, jit(grad(lambda x: vmap(tfb.Sigmoid().inverse)(x).sum()))(x))
plt.show()
RealNVP および FFJORD などの一部のバイジェクターはまだサポートされていません。
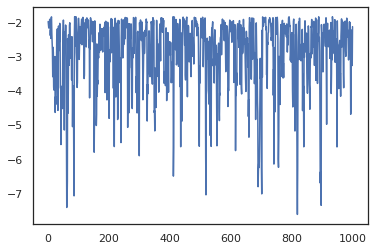
MCMC
tfp.mcmc も JAX に移植されているので、ハミルトニアンモンテカルロ(HMC)や No-U-Turn-Sampler(NUTS)などのアルゴリズムを JAX で実行できます。
target_log_prob = tfd.MultivariateNormalDiag(jnp.zeros(2), jnp.ones(2)).log_prob
TF 上の TFP とは異なり、seed キーワード引数を使用して、PRNGKey を sample_chain に渡す必要があります。
def run_chain(key, state):
kernel = tfp.mcmc.NoUTurnSampler(target_log_prob, 1e-1)
return tfp.mcmc.sample_chain(1000,
current_state=state,
kernel=kernel,
trace_fn=lambda _, results: results.target_log_prob,
seed=key)
states, log_probs = jit(run_chain)(random.PRNGKey(0), jnp.zeros(2))
plt.figure()
plt.scatter(*states.T, alpha=0.5)
plt.figure()
plt.plot(log_probs)
plt.show()
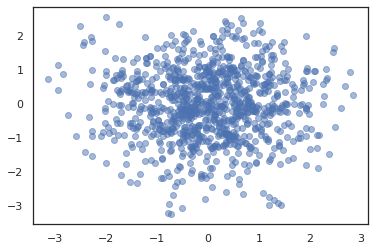
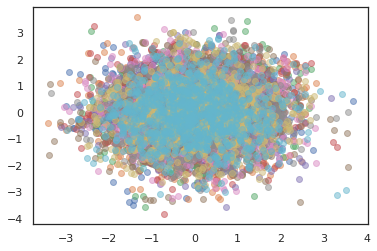
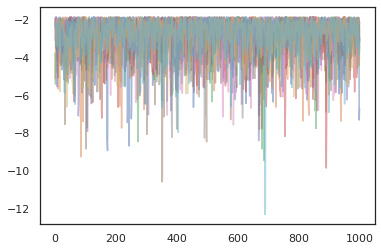
複数のチェーンを実行するには、状態のバッチを sample_chain に渡すか、vmap を使用します(ただし、2 つのアプローチのパフォーマンスの違いについてはまだ調査されていません)。
states, log_probs = jit(run_chain)(random.PRNGKey(0), jnp.zeros([10, 2]))
plt.figure()
for i in range(10):
plt.scatter(*states[:, i].T, alpha=0.5)
plt.figure()
for i in range(10):
plt.plot(log_probs[:, i], alpha=0.5)
plt.show()
オプティマイザ
JAX 上の TFP は、BFGS や L-BFGS などのいくつかの重要なオプティマイザをサポートしています。単純なスケーリングされた 2 次損失関数を設定しましょう。
minimum = jnp.array([1.0, 1.0]) # The center of the quadratic bowl.
scales = jnp.array([2.0, 3.0]) # The scales along the two axes.
# The objective function and the gradient.
def quadratic_loss(x):
return jnp.sum(scales * jnp.square(x - minimum))
start = jnp.array([0.6, 0.8]) # Starting point for the search.
BFGS は、この損失の最小値を見つけることができます。
optim_results = tfp.optimizer.bfgs_minimize(
value_and_grad(quadratic_loss), initial_position=start, tolerance=1e-8)
# Check that the search converged
assert(optim_results.converged)
# Check that the argmin is close to the actual value.
np.testing.assert_allclose(optim_results.position, minimum)
# Print out the total number of function evaluations it took. Should be 5.
print("Function evaluations: %d" % optim_results.num_objective_evaluations)
Function evaluations: 5
L-BFGS でもできます。
optim_results = tfp.optimizer.lbfgs_minimize(
value_and_grad(quadratic_loss), initial_position=start, tolerance=1e-8)
# Check that the search converged
assert(optim_results.converged)
# Check that the argmin is close to the actual value.
np.testing.assert_allclose(optim_results.position, minimum)
# Print out the total number of function evaluations it took. Should be 5.
print("Function evaluations: %d" % optim_results.num_objective_evaluations)
Function evaluations: 5
L-BFGS で vmap を実行するために、単一の開始点の損失を最適化する関数を設定しましょう。
def optimize_single(start):
return tfp.optimizer.lbfgs_minimize(
value_and_grad(quadratic_loss), initial_position=start, tolerance=1e-8)
all_results = jit(vmap(optimize_single))(
random.normal(random.PRNGKey(0), (10, 2)))
assert all(all_results.converged)
for i in range(10):
np.testing.assert_allclose(optim_results.position[i], minimum)
print("Function evaluations: %s" % all_results.num_objective_evaluations)
Function evaluations: [6 6 9 6 6 8 6 8 5 9]
注意事項
TF と JAX の間にはいくつかの基本的な違いがあり、一部の TFP の動作は、2 つのサブストレート間で異なり、すべての機能がサポートされているわけではありません。以下に例を示します。
- JAX 上の TFP は、JAX に存在するようなものがないため、
tf.Variableなどをサポートしていません。また、tfp.util.TransformedVariableのようなユーティリティもサポートされていません。 tfp.layersは、Keras とtf.Variableに依存しているため、バックエンドではまだサポートされていません。tfp.math.minimizeは、tf.Variableに依存しているため、JAX 上の TFP では機能しません。- JAX 上の TFP では、テンソル形状は常に具体的な整数値であり、TF 上の TFP のように不明/動的になることはありません。
- 疑似ランダム性は、TF と JAX で異なる方法で処理されます(付録を参照)。
tfp.experimentalのライブラリは、JAX サブストレートに存在することが保証されていません。- Dtype プロモーションルールは TF と JAX で異なります。JAX 上の TFP は、一貫性を保つために、内部的に TF の dtype セマンティクスに従います。
- バイジェクターはまだ JAX pytrees として登録されていません。
JAX 上の TFP でサポートされている機能の完全なリストを確認するには、API ドキュメントを参照してください。
結論
TFP の多くの機能が JAX でサポートされるようになりました。これらを利用して皆さんが何を構築するかを楽しみにしています。一部の機能はまだサポートされていません。皆さんにとって重要な機能がサポートされていない場合(またはバグを見つけた場合)は、tfprobability@tensorflow.org までご連絡ください。または、Github リポジトリで課題を作成してください。
付録:JAX の疑似ランダム性
JAX の疑似乱数生成(PRNG)モデルはステートレスです。ステートフルモデルとは異なり、ランダムにドローするたびに進化する可変のグローバル状態はありません。JAX のモデルでは、32 ビット整数のペアのように機能する PRNG キーから始めます。これらのキーは、jax.random.PRNGKey を使用して作成できます。
key = random.PRNGKey(0) # Creates a key with value [0, 0]
print(key)
[0 0]
JAX の確率関数は、確定的にランダム変量を生成するためのキーを使用します。つまり、それらを再度使用しないでください。たとえば、key を使用して正規分布の値をサンプリングできますが、他の場所で key を再度使用することはできません。さらに、random.normal に渡すと、同じ値が生成されます。
print(random.normal(key))
-0.20584226
では、1 つのキーから複数のサンプルを抽出するにはどうしたらよいでしょうか。答えはキー分割です。基本的な考え方は、PRNGKey を複数に分割でき、新しいキーのそれぞれを独立したランダム性のソースとして扱うということです。
key1, key2 = random.split(key, num=2)
print(key1, key2)
[4146024105 967050713] [2718843009 1272950319]
キー分割は確定的ですが、混沌としているため、新しいキーをそれぞれ使用して、個別のランダムサンプルをドローできるようになりました。
print(random.normal(key1), random.normal(key2))
0.14389051 -1.2515389
JAX の確定的キー分割モデルの詳細については、このガイドを参照してください。