
Przegląd
Siatki i chmury punktów to ważne i potężne typy danych reprezentujących kształty 3D, szeroko badane w dziedzinie widzenia komputerowego i grafiki komputerowej. Dane 3D stają się coraz bardziej wszechobecne, a badacze stawiają czoła nowym problemom, takim jak rekonstrukcja geometrii 3D z danych 2D, segmentacja semantyczna chmury punktów 3D, wyrównywanie lub przekształcanie obiektów 3D i tak dalej. Dlatego wizualizacja wyników, zwłaszcza na etapie uczenia, ma kluczowe znaczenie dla lepszego zrozumienia działania modelu.
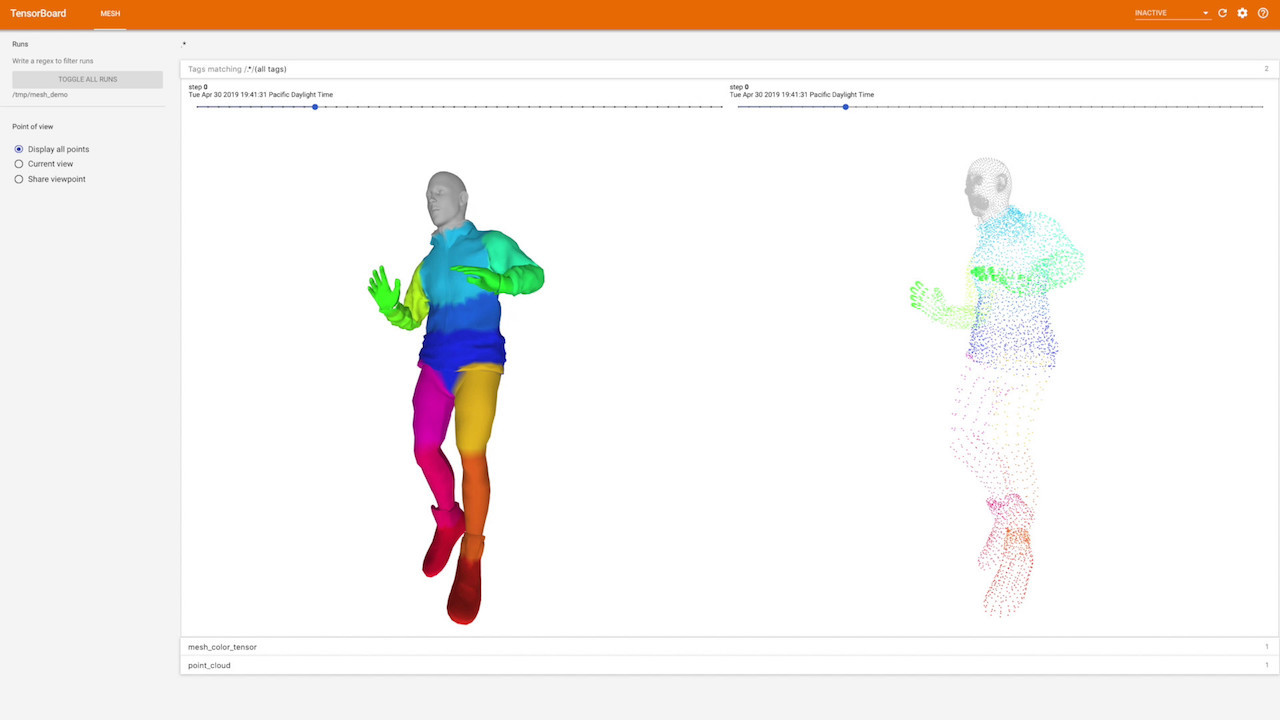 {width="100%"}
{width="100%"}
Ta wtyczka ma na celu wyświetlanie chmur punktów lub siatek 3D (triangulowanych chmur punktów) w TensorBoard. Dodatkowo umożliwia użytkownikowi interakcję z renderowanymi obiektami.
Podsumowanie interfejsu API
Za pomocą zestawu tensorów można przedstawić siatkę lub chmurę punktów. Na przykład chmurę punktów można zobaczyć jako zbiór współrzędnych 3D punktów i niektórych kolorów powiązanych z każdym punktem.
from tensorboard.plugins.mesh import summary as mesh_summary
...
point_cloud = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
point_colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
summary = mesh_summary.op('point_cloud', vertices=point_cloud, colors=point_colors)
UWAGA tensor colors jest w tym przypadku opcjonalny, ale może być przydatny do pokazania różnej semantyki punktów.
Wtyczka obsługuje obecnie tylko siatki trójkątne, które różnią się od powyższych chmur punktów jedynie obecnością ścian - zbioru wierzchołków reprezentujących trójkąt na siatce.
mesh = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
faces = tf.constant([[[13, 78, 54], ...]], shape=[1, 752, 3])
summary = mesh_summary.op('mesh', vertices=mesh, colors=colors, faces=faces)
W przypadku podsumowań siatki opcjonalny jest tylko tensor colors .
Konfiguracja sceny
Sposób wyświetlania obiektów zależy także od konfiguracji sceny, czyli natężenia i koloru źródeł światła, materiału, z jakiego wykonane są obiekty, modeli kamer itp. Wszystko to można skonfigurować za pomocą dodatkowego parametru config_dict . Słownik ten może zawierać trzy klucze wysokiego poziomu: camera , lights i material . Każdy klucz musi być także słownikiem z obowiązkowym kluczem cls reprezentującym prawidłową nazwę klasy THREE.js .
camera_config = {'cls': 'PerspectiveCamera'}
summary = mesh_summary.op(
"mesh",
vertices=mesh,
colors=colors,
faces=faces,
config_dict={"camera": camera_config},
)
camera_config z powyższego fragmentu można rozwinąć zgodnie z dokumentacją THREE.js . Wszystkie klucze z camera_config zostaną przekazane do klasy o nazwie camera_config.cls . Na przykład (na podstawie dokumentacji PerspectiveCamera ):
camera_config = {
'cls': 'PerspectiveCamera',
'fov': 75,
'aspect': 0.9,
}
...
Należy pamiętać, że konfiguracja sceny nie jest zmienną podlegającą szkoleniu (tj. statyczną) i powinna być podawana jedynie podczas tworzenia podsumowań.
Jak zainstalować
Obecnie wtyczka jest częścią nocnej kompilacji TensorBoard, dlatego musisz ją zainstalować przed użyciem wtyczki.
Colab
pip install -q -U tb-nightlyNastępnie załaduj rozszerzenie Tensorboard i uruchom je, podobnie jak zrobiłbyś to w terminalu:
%load_ext tensorboard
%tensorboard --logdir=/path/to/logs
Aby uzyskać więcej informacji, zapoznaj się z przykładowym notatnikiem Colab .
Terminal
Jeśli chcesz lokalnie uruchamiać nocną kompilację TensorBoard, najpierw musisz ją zainstalować:
pip install tf-nightly
Następnie po prostu uruchom:
tensorboard --logdir path/to/logs