
- 설명 :
이것은 여러 방향이 시각적으로 구별할 수 없는 대칭 3D 모양으로 구성된 포즈 추정 데이터 세트입니다. 문제는 훈련 중에 각 이미지와 하나의 방향만 쌍을 이룰 때 모든 동등한 방향을 예측하는 것입니다(대부분의 포즈 추정 데이터 세트에 대한 시나리오). 대부분의 포즈 추정 데이터 세트와 달리 등가 방향의 전체 세트를 평가할 수 있습니다.
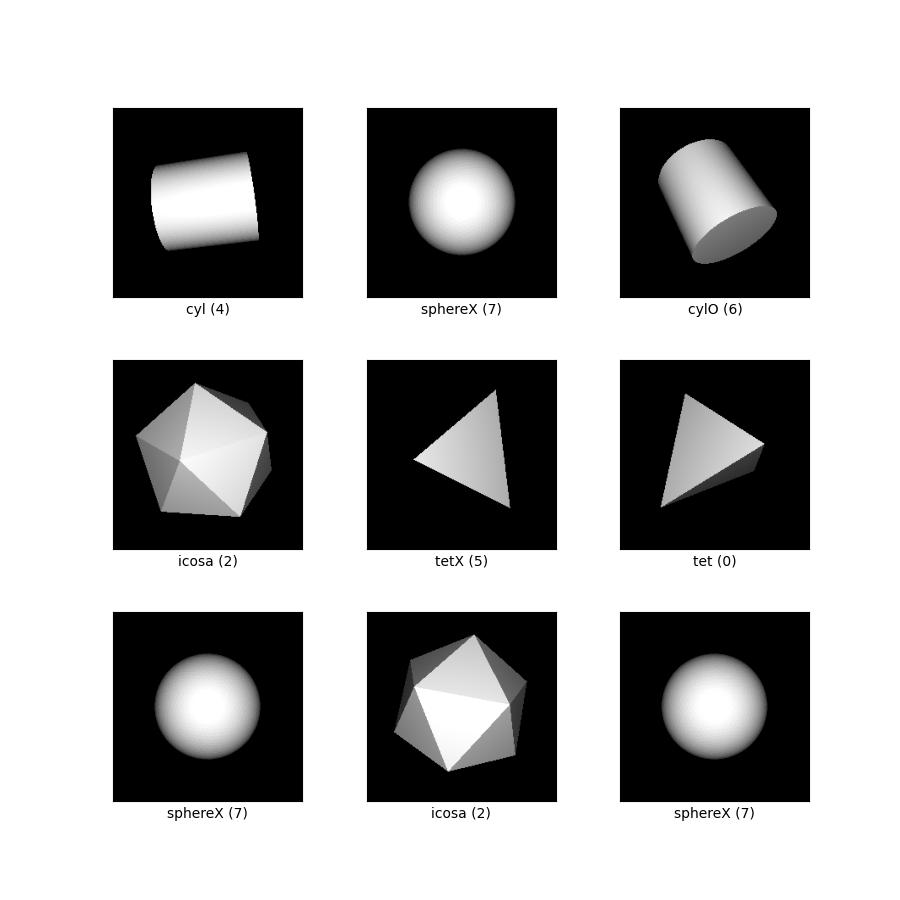
총 8개의 모양이 있으며, 각각은 3D 회전의 전체 공간에 걸쳐 무작위로 균일하게 분포된 50,000개의 시점에서 렌더링됩니다. 4면체, 정육면체, 20면체, 원뿔 및 원기둥의 다섯 가지 모양은 특징이 없습니다. 그 중 3개의 플라톤 다면체(4면체, 정육면체, 20면체)는 각각 12, 24, 60배 이산 대칭으로 주석이 달려 있습니다. 원뿔과 원통은 1도 간격으로 이산화된 연속 대칭으로 주석이 표시됩니다. 이러한 대칭은 평가를 위해 제공됩니다. 의도된 감독은 각 이미지의 단일 회전입니다.
나머지 3개의 모양에는 구별되는 특징이 표시되어 있습니다. 한 면이 붉은색인 정사면체, 중심에서 벗어난 점이 있는 원기둥, 점으로 덮인 X가 있는 구가 있습니다. 구별되는 특징이 보이는지 여부에 관계없이 가능한 방향의 공간이 줄어듭니다. 이러한 모양에 대해 등가 회전 집합을 제공하지 않습니다.
각 예제에는 다음이 포함됩니다.
- 224x224 RGB 이미지
데이터 세트가 모양으로 필터링될 수 있도록 모양 인덱스.
인덱스는 다음에 해당합니다.- 0 = 사면체
- 1 = 입방체
- 2 = 20면체
- 3 = 원뿔
- 4 = 실린더
- 5 = 표시된 사면체
- 6 = 표시된 실린더
- 7 = 표시된 구
3x3 회전 행렬로 표현되는 렌더링 프로세스에 사용되는 회전
평가를 위해 대칭 하에서 알려진 등가 회전 세트.
세 개의 표시된 모양의 경우 렌더링 회전만 해당됩니다.
추가 문서 : 코드가 있는 논문에서 탐색
버전 :
-
1.0.0(기본값): 최초 릴리스.
-
다운로드 크기 :
3.10 GiB데이터세트 크기 :
3.94 GiB자동 캐시 ( 문서 ): 아니요
분할 :
| 나뉘다 | 예 |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- 기능 구조 :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- 기능 문서 :
| 특징 | 수업 | 모양 | D타입 | 설명 |
|---|---|---|---|---|
| 풍모Dict | ||||
| 영상 | 영상 | (224, 224, 3) | uint8 | |
| label_shape | 클래스 레이블 | int64 | ||
| 회전 | 텐서 | (3, 3) | float32 | |
| rotations_equivalent | 텐서 | (없음, 3, 3) | float32 |
감독된 키 (
as_supervised문서 참조):('image', 'rotation')그림 ( tfds.show_examples ):
- 예 ( tfds.as_dataframe ):
- 인용 :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}