
- Descriptif :
Il s'agit d'un ensemble de données d'estimation de pose, composé de formes 3D symétriques où plusieurs orientations sont visuellement impossibles à distinguer. Le défi consiste à prédire toutes les orientations équivalentes lorsqu'une seule orientation est associée à chaque image pendant la formation (comme c'est le cas pour la plupart des ensembles de données d'estimation de pose). Contrairement à la plupart des ensembles de données d'estimation de pose, l'ensemble complet des orientations équivalentes est disponible pour l'évaluation.
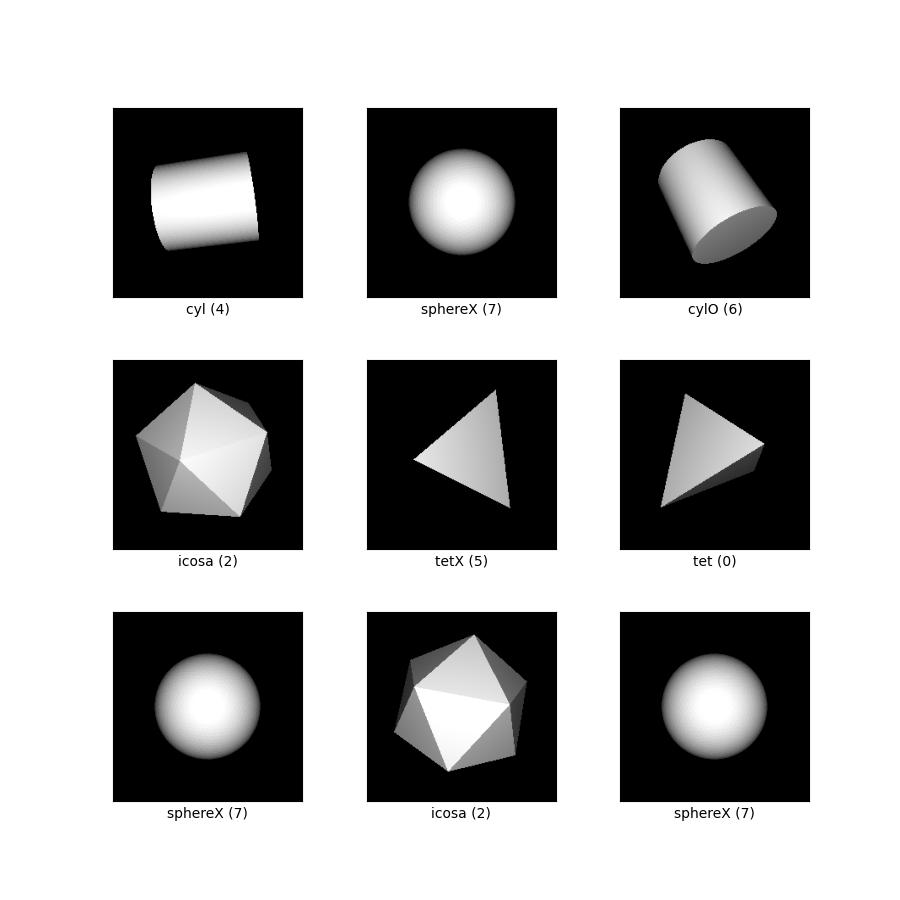
Il y a huit formes au total, chacune rendue à partir de 50 000 points de vue répartis uniformément au hasard sur tout l'espace des rotations 3D. Cinq des formes sont sans relief : tétraèdre, cube, icosaèdre, cône et cylindre. Parmi ceux-ci, les trois solides de Platon (tétraèdre, cube, icosaèdre) sont annotés avec leurs symétries discrètes de 12, 24 et 60 fois, respectivement. Le cône et le cylindre sont annotés avec leurs symétries continues discrétisées à des intervalles de 1 degré. Ces symétries sont fournies pour évaluation ; la surveillance prévue n'est qu'une seule rotation avec chaque image.
Les trois formes restantes sont marquées d'un trait distinctif. Il y a un tétraèdre avec une face de couleur rouge, un cylindre avec un point décentré et une sphère avec un X coiffé d'un point. Que le signe distinctif soit visible ou non, l'espace des orientations possibles est réduit. Nous ne fournissons pas l'ensemble des rotations équivalentes pour ces formes.
Chaque exemple contient de
- l'image RVB 224x224
un index de forme afin que l'ensemble de données puisse être filtré par forme.
Les indices correspondent à :- 0 = tétraèdre
- 1 = cube
- 2 = icosaèdre
- 3 = cône
- 4 = cylindre
- 5 = tétraèdre marqué
- 6 = cylindre marqué
- 7 = sphère marquée
la rotation utilisée dans le processus de rendu, représentée sous la forme d'une matrice de rotation 3x3
l'ensemble des rotations équivalentes connues sous symétrie, pour évaluation.
Dans le cas des trois formes marquées, il s'agit uniquement de la rotation du rendu.
Documentation complémentaire : Explorer sur Papers With Code
Page d' accueil : https://implicit-pdf.github.io
Code source :
tfds.datasets.symmetric_solids.BuilderVersions :
-
1.0.0(par défaut) : version initiale.
-
Taille du téléchargement :
3.10 GiBTaille du jeu de données :
3.94 GiBMise en cache automatique ( documentation ): Non
Fractionnements :
| Diviser | Exemples |
|---|---|
'test' | 40 000 |
'train' | 360 000 |
- Structure des fonctionnalités :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Documentation des fonctionnalités :
| Caractéristique | Classer | Forme | Dtype | La description |
|---|---|---|---|---|
| FonctionnalitésDict | ||||
| image | Image | (224, 224, 3) | uint8 | |
| label_shape | Étiquette de classe | int64 | ||
| rotation | Tenseur | (3, 3) | float32 | |
| rotations_equivalent | Tenseur | (Aucun, 3, 3) | float32 |
Touches supervisées (Voir doc
as_supervised):('image', 'rotation')Figure ( tfds.show_examples ):
- Exemples ( tfds.as_dataframe ):
- Citation :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}