
- توضیحات :
این یک مجموعه داده تخمین پوز است که از اشکال سه بعدی متقارن تشکیل شده است که جهت گیری های متعدد از نظر بصری قابل تشخیص نیستند. چالش پیشبینی تمام جهتگیریهای معادل زمانی است که فقط یک جهت با هر تصویر در طول آموزش جفت میشود (همانطور که سناریوی اکثر مجموعه دادههای تخمین پوز است). برخلاف اکثر مجموعه دادههای تخمین موقعیت، مجموعه کامل جهتگیریهای معادل برای ارزیابی در دسترس است.
در مجموع هشت شکل وجود دارد که هر کدام از 50000 دیدگاه ارائه شده است که به طور تصادفی در فضای کامل چرخش های سه بعدی توزیع شده اند. پنج تا از شکل ها بی خاصیت هستند - چهار وجهی، مکعب، ایکوسادرون، مخروط و استوانه. از این میان، سه جامد افلاطونی (چهار وجهی، مکعبی، ایکو وجهی) به ترتیب با تقارن های گسسته 12، 24 و 60 برابری خود حاشیه نویسی شده اند. مخروط و استوانه با تقارن پیوسته خود در فواصل 1 درجه مشروح شده اند. این تقارن ها برای ارزیابی ارائه شده است. نظارت مورد نظر تنها یک چرخش با هر تصویر است.
سه شکل باقی مانده با یک ویژگی متمایز مشخص شده اند. یک چهار وجهی با یک صورت قرمز رنگ، یک استوانه با یک نقطه خارج از مرکز و یک کره با X وجود دارد که با یک نقطه درپوش دارد. چه ویژگی متمایز قابل مشاهده باشد یا نه، فضای جهت گیری های ممکن کاهش می یابد. ما مجموعه ای از چرخش های معادل را برای این اشکال ارائه نمی دهیم.
هر مثال شامل
- تصویر 224x224 RGB
یک شاخص شکل به طوری که مجموعه داده ممکن است بر اساس شکل فیلتر شود.
شاخص ها مطابق با:- 0 = چهار وجهی
- 1 = مکعب
- 2 = ایکو وجهی
- 3 = مخروط
- 4 = سیلندر
- 5 = چهار وجهی مشخص شده
- 6 = سیلندر علامت گذاری شده
- 7 = کره مشخص شده
چرخش مورد استفاده در فرآیند رندر، به عنوان یک ماتریس چرخش 3x3 نشان داده شده است
مجموعه ای از چرخش های معادل شناخته شده تحت تقارن، برای ارزیابی.
در مورد سه شکل مشخص شده، این فقط چرخش رندر است.
اسناد اضافی : کاوش در کاغذها با کد
صفحه اصلی : https://implicit-pdf.github.io
کد منبع :
tfds.datasets.symmetric_solids.Builderنسخه ها :
-
1.0.0(پیش فرض): انتشار اولیه.
-
حجم دانلود :
3.10 GiBحجم مجموعه داده :
3.94 GiBذخیره خودکار ( اسناد ): خیر
تقسیم ها :
| شکاف | مثال ها |
|---|---|
'test' | 40000 |
'train' | 360000 |
- ساختار ویژگی :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- مستندات ویژگی :
| ویژگی | کلاس | شکل | نوع D | شرح |
|---|---|---|---|---|
| FeaturesDict | ||||
| تصویر | تصویر | (224، 224، 3) | uint8 | |
| برچسب_شکل | ClassLabel | int64 | ||
| چرخش | تانسور | (3، 3) | float32 | |
| rotations_equivalent | تانسور | (هیچ، 3، 3) | float32 |
کلیدهای نظارت شده (به
as_supervisedنظارت شده مراجعه کنید):('image', 'rotation')شکل ( tfds.show_examples ):
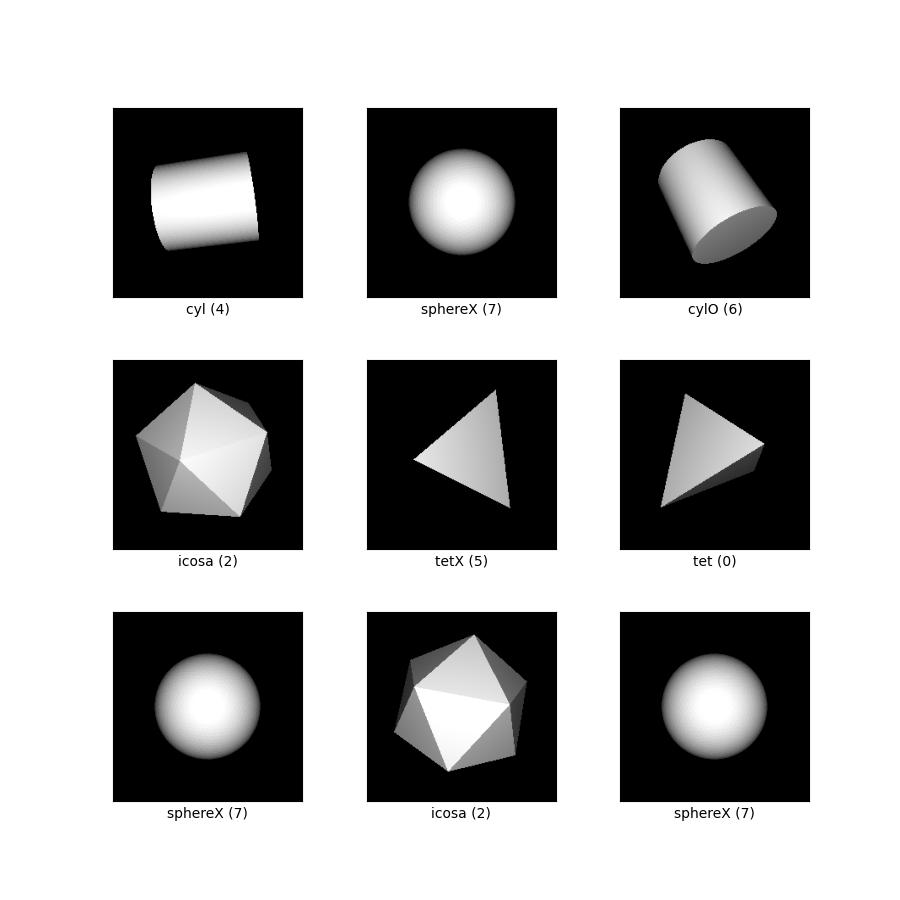
- مثالها ( tfds.as_dataframe ):
- نقل قول :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}