
- विवरण :
यह एक पोज़ अनुमान डेटासेट है, जिसमें सममित 3डी आकृतियाँ शामिल हैं जहाँ कई ओरिएंटेशन दृष्टिगत रूप से अप्रभेद्य हैं। प्रशिक्षण के दौरान प्रत्येक छवि के साथ केवल एक अभिविन्यास जोड़े जाने पर सभी समतुल्य अभिविन्यासों की भविष्यवाणी करना चुनौती है (जैसा कि अधिकांश मुद्रा अनुमान डेटासेट के लिए परिदृश्य है)। अधिकांश पोज़ अनुमान डेटासेट के विपरीत, समतुल्य अभिविन्यास का पूरा सेट मूल्यांकन के लिए उपलब्ध है।
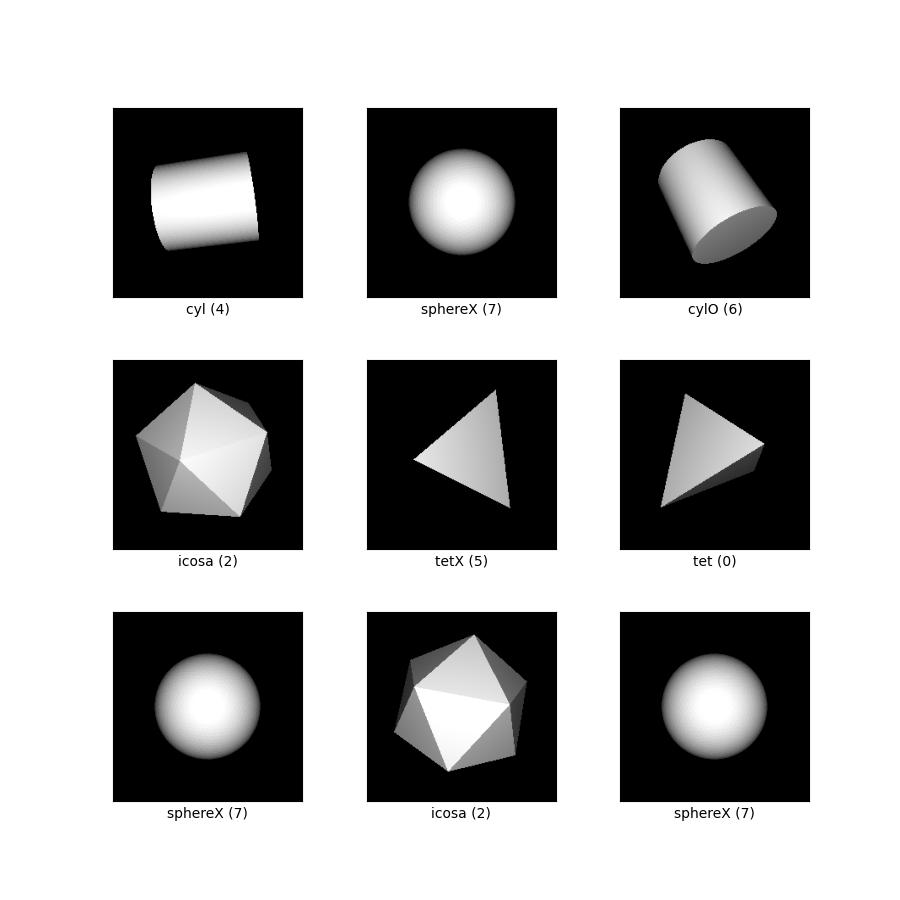
कुल आठ आकार हैं, प्रत्येक को 50,000 दृष्टिकोणों से प्रस्तुत किया गया है जो 3डी घुमावों के पूर्ण स्थान पर यादृच्छिक रूप से समान रूप से वितरित किए गए हैं। पाँच आकृतियाँ फ़ीचर रहित हैं - टेट्राहेड्रॉन, क्यूब, आईकोसैहेड्रॉन, शंकु और बेलन। उनमें से, तीन प्लेटोनिक ठोस (टेट्राहेड्रॉन, क्यूब, आईकोसैहेड्रोन) क्रमशः 12-, 24-, और 60-गुना असतत समरूपता के साथ एनोटेट किए जाते हैं। शंकु और सिलेंडर को उनके निरंतर समरूपता के साथ 1 डिग्री के अंतराल पर विखंडित किया जाता है। ये समरूपता मूल्यांकन के लिए प्रदान की जाती हैं; इच्छित पर्यवेक्षण प्रत्येक छवि के साथ केवल एक घुमाव है।
शेष तीन आकृतियों को एक विशिष्ट विशेषता के साथ चिह्नित किया गया है। एक टेट्राहेड्रॉन है जिसमें एक लाल रंग का चेहरा है, एक ऑफ-सेंटर डॉट वाला एक सिलेंडर है, और एक एक्स के साथ एक डॉट द्वारा कैप किया गया है। विशिष्ट विशेषता दिखाई देती है या नहीं, संभावित अभिविन्यासों का स्थान कम हो जाता है। हम इन आकृतियों के लिए समतुल्य घुमावों का सेट प्रदान नहीं करते हैं।
प्रत्येक उदाहरण में शामिल हैं
- 224x224 आरजीबी छवि
आकार अनुक्रमणिका ताकि डेटासेट को आकृति द्वारा फ़िल्टर किया जा सके।
सूचकांक इसके अनुरूप हैं:- 0 = चतुष्फलक
- 1 = घन
- 2 = आईकोसैहेड्रोन
- 3 = कोन
- 4 = सिलेंडर
- 5 = चिन्हित चतुष्फलक
- 6 = चिह्नित सिलेंडर
- 7 = चिह्नित क्षेत्र
रेंडरिंग प्रक्रिया में प्रयुक्त रोटेशन, जिसे 3x3 रोटेशन मैट्रिक्स के रूप में दर्शाया गया है
समरूपता के तहत ज्ञात समतुल्य घुमावों का सेट, मूल्यांकन के लिए।
तीन चिह्नित आकृतियों के मामले में, यह केवल रेंडरिंग रोटेशन है।
अतिरिक्त दस्तावेज़ीकरण : कोड वाले पेपर्स पर एक्सप्लोर करें
होमपेज : https://implicit-pdf.github.io
स्रोत कोड :
tfds.datasets.symmetric_solids.Builderसंस्करण :
-
1.0.0(डिफ़ॉल्ट): प्रारंभिक रिलीज़।
-
डाउनलोड आकार :
3.10 GiBडेटासेट का आकार :
3.94 GiBऑटो-कैश्ड ( दस्तावेज़ीकरण ): नहीं
विभाजन :
| विभाजित करना | उदाहरण |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- फ़ीचर संरचना :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- फ़ीचर दस्तावेज़ीकरण :
| विशेषता | कक्षा | आकार | डीटाइप | विवरण |
|---|---|---|---|---|
| विशेषताएं डिक्ट | ||||
| छवि | छवि | (224, 224, 3) | uint8 | |
| लेबल_आकार | क्लासलेबल | int64 | ||
| रोटेशन | टेन्सर | (3, 3) | फ्लोट32 | |
| घुमाव_समतुल्य | टेन्सर | (कोई नहीं, 3, 3) | फ्लोट32 |
पर्यवेक्षित कुंजी (
as_supervisedदस्तावेज़ देखें):('image', 'rotation')चित्र ( tfds.show_examples ):
- उदाहरण ( tfds.as_dataframe ):
- उद्धरण :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}