
- الوصف :
هذه مجموعة بيانات تقدير الوضع ، تتكون من أشكال ثلاثية الأبعاد متماثلة حيث لا يمكن تمييز الاتجاهات المتعددة بصريًا. يتمثل التحدي في التنبؤ بجميع الاتجاهات المكافئة عندما يتم إقران اتجاه واحد فقط مع كل صورة أثناء التدريب (كما هو الحال بالنسبة لمعظم مجموعات بيانات تقدير الوضع). على عكس معظم مجموعات بيانات تقدير الوضع ، فإن المجموعة الكاملة من التوجهات المكافئة متاحة للتقييم.
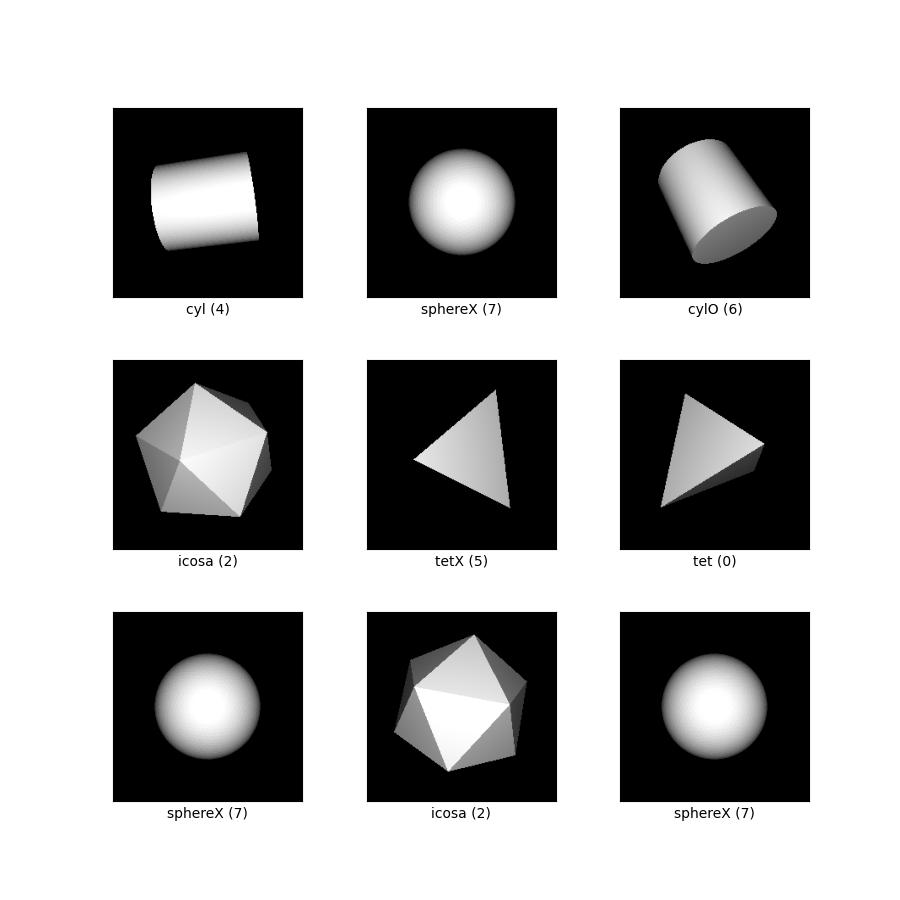
هناك ثمانية أشكال إجمالية ، يتم تقديم كل منها من 50000 وجهة نظر موزعة بشكل موحد عشوائيًا على المساحة الكاملة للدورات ثلاثية الأبعاد. خمسة من الأشكال بلا ملامح - رباعي السطوح ، مكعب ، عشري الوجوه ، مخروط ، واسطوانة. من بين هؤلاء ، تم شرح المواد الصلبة الأفلاطونية الثلاثة (رباعي الوجوه ، مكعب ، عشري الوجوه) بتماثلاتها المنفصلة 12 و 24 و 60 ضعفًا ، على التوالي. يتم شرح المخروط والأسطوانة بتماثلاتهما المستمرة التي يتم تحديدها على فترات زمنية من درجة واحدة. يتم توفير هذه التماثلات للتقييم ؛ الإشراف المقصود هو دوران واحد فقط مع كل صورة.
يتم تمييز الأشكال الثلاثة المتبقية بميزة مميزة. يوجد رباعي السطوح بوجه واحد أحمر اللون ، وأسطوانة بها نقطة غير مركزية ، وكرة بها علامة X متوجة بنقطة. سواء كانت السمة المميزة مرئية أم لا ، يتم تقليل مساحة الاتجاهات المحتملة. لا نقدم مجموعة الدورات المكافئة لهذه الأشكال.
يحتوي كل مثال على
- صورة RGB بحجم 224 × 224
فهرس الشكل بحيث يمكن تصفية مجموعة البيانات حسب الشكل.
تتوافق المؤشرات مع:- 0 = رباعي الوجوه
- 1 = مكعب
- 2 = عشروني الوجوه
- 3 = مخروط
- 4 = اسطوانة
- 5 = علامة رباعي السطوح
- 6 = اسطوانة ملحوظة
- 7 = المجال المحدد
التدوير المستخدم في عملية التقديم ، ويتم تمثيله كمصفوفة تناوب 3x3
مجموعة الدورات المكافئة المعروفة في ظل التناظر ، للتقييم.
في حالة الأشكال الثلاثة المميزة ، يكون هذا فقط دوران العرض.
وثائق إضافية : استكشف في الأوراق باستخدام الرمز
الصفحة الرئيسية : https://implicit-pdf.github.io
كود المصدر :
tfds.datasets.symmetric_solids.Builderإصدارات :
-
1.0.0(افتراضي): الإصدار الأولي.
-
حجم التحميل :
3.10 GiBحجم مجموعة البيانات :
3.94 GiBالتخزين المؤقت التلقائي ( التوثيق ): لا
الانقسامات :
| انشق، مزق | أمثلة |
|---|---|
'test' | 40000 |
'train' | 360.000 |
- هيكل الميزة :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- وثائق الميزة :
| ميزة | فصل | شكل | نوع | وصف |
|---|---|---|---|---|
| الميزات | ||||
| صورة | صورة | (224 ، 224 ، 3). | uint8 | |
| التسمية_شكل | ClassLabel | int64 | ||
| دوران | موتر | (3 ، 3) | تعويم 32 | |
| التناوب_ المكافئ | موتر | (لا شيء ، 3 ، 3) | تعويم 32 |
المفاتيح الخاضعة للإشراف (راجع المستند
as_supervised):('image', 'rotation')الشكل ( tfds.show_examples ):
- أمثلة ( tfds.as_dataframe ):
- الاقتباس :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}