
- 설명 :
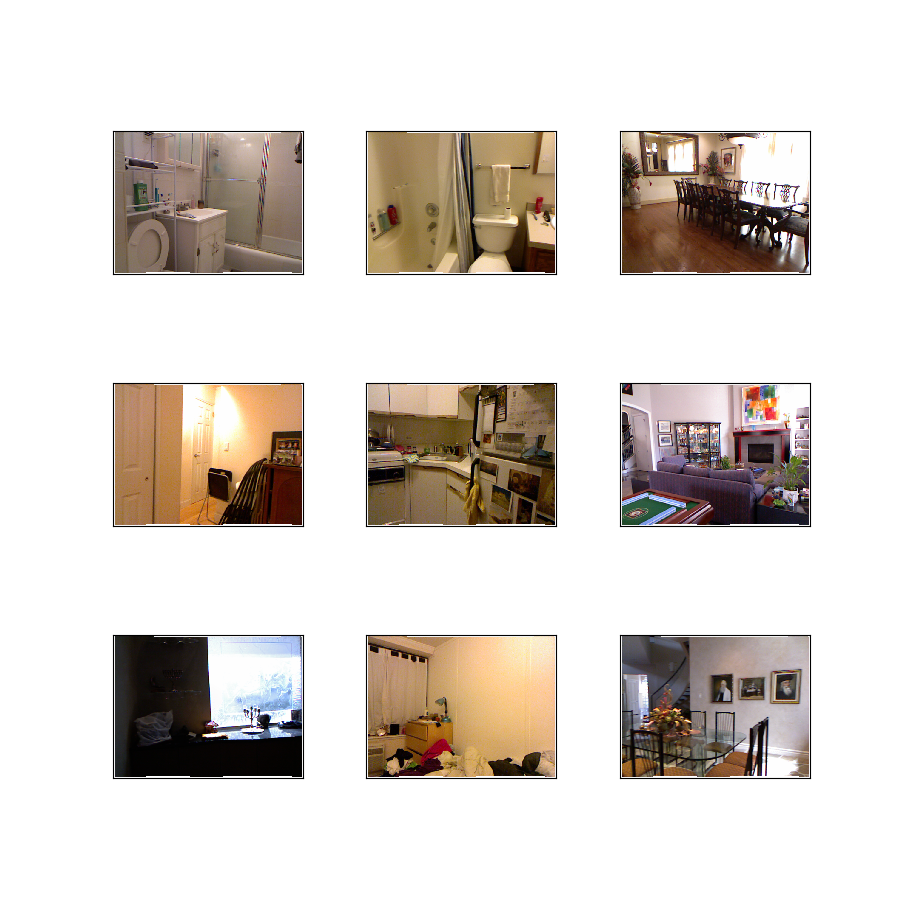
NYU-Depth V2 데이터 세트는 Microsoft Kinect의 RGB 및 깊이 카메라로 기록된 다양한 실내 장면의 비디오 시퀀스로 구성됩니다.
추가 문서 : 코드가 있는 논문에서 탐색
홈페이지 : https://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
버전 :
-
0.0.1(기본값): 릴리스 정보가 없습니다.
-
다운로드 크기 :
31.92 GiB데이터세트 크기 :
74.03 GiB자동 캐시 ( 문서 ): 아니요
분할 :
| 나뉘다 | 예 |
|---|---|
'train' | 47,584 |
'validation' | 654 |
- 기능 구조 :
FeaturesDict({
'depth': Tensor(shape=(480, 640), dtype=float16),
'image': Image(shape=(480, 640, 3), dtype=uint8),
})
- 기능 문서 :
| 특징 | 수업 | 모양 | D타입 | 설명 |
|---|---|---|---|---|
| 풍모Dict | ||||
| 깊이 | 텐서 | (480, 640) | float16 | |
| 영상 | 영상 | (480, 640, 3) | uint8 |
감독 키 (
as_supervised문서 참조):('image', 'depth')그림 ( tfds.show_examples ):
- 예 ( tfds.as_dataframe ):
- 인용 :
@inproceedings{Silberman:ECCV12,
author = {Nathan Silberman, Derek Hoiem, Pushmeet Kohli and Rob Fergus},
title = {Indoor Segmentation and Support Inference from RGBD Images},
booktitle = {ECCV},
year = {2012}
}
@inproceedings{icra_2019_fastdepth,
author = {Wofk, Diana and Ma, Fangchang and Yang, Tien-Ju and Karaman, Sertac and Sze, Vivienne},
title = {FastDepth: Fast Monocular Depth Estimation on Embedded Systems},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2019}
}