
Copyright 2021 Os autores do TF-Agents.
| | |  Ver fonte no GitHub Ver fonte no GitHub | |
Introdução
Este exemplo mostra como treinar um categórico DQN (C51) agente no ambiente Cartpole usando a biblioteca TF-agentes.
Certifique-se de dar uma olhada através do tutorial DQN como um pré-requisito. Este tutorial presumirá familiaridade com o tutorial DQN; ele se concentrará principalmente nas diferenças entre DQN e C51.
Configurar
Se você ainda não instalou tf-agents, execute:
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agentspip install pyglet
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import PIL.Image
import pyvirtualdisplay
import tensorflow as tf
from tf_agents.agents.categorical_dqn import categorical_dqn_agent
from tf_agents.drivers import dynamic_step_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import categorical_q_network
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import tf_uniform_replay_buffer
from tf_agents.trajectories import trajectory
from tf_agents.utils import common
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
Hiperparâmetros
env_name = "CartPole-v1" # @param {type:"string"}
num_iterations = 15000 # @param {type:"integer"}
initial_collect_steps = 1000 # @param {type:"integer"}
collect_steps_per_iteration = 1 # @param {type:"integer"}
replay_buffer_capacity = 100000 # @param {type:"integer"}
fc_layer_params = (100,)
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
gamma = 0.99
log_interval = 200 # @param {type:"integer"}
num_atoms = 51 # @param {type:"integer"}
min_q_value = -20 # @param {type:"integer"}
max_q_value = 20 # @param {type:"integer"}
n_step_update = 2 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
Ambiente
Carregue o ambiente como antes, com um para treinamento e outro para avaliação. Aqui usamos CartPole-v1 (vs. CartPole-v0 no tutorial DQN), que tem uma recompensa máxima maior de 500 em vez de 200.
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
Agente
C51 é um algoritmo de Q-learning baseado em DQN. Como o DQN, ele pode ser usado em qualquer ambiente com um espaço de ação discreto.
A principal diferença entre C51 e DQN é que em vez de simplesmente prever o valor Q para cada par de ação de estado, C51 prevê um modelo de histograma para a distribuição de probabilidade do valor Q:
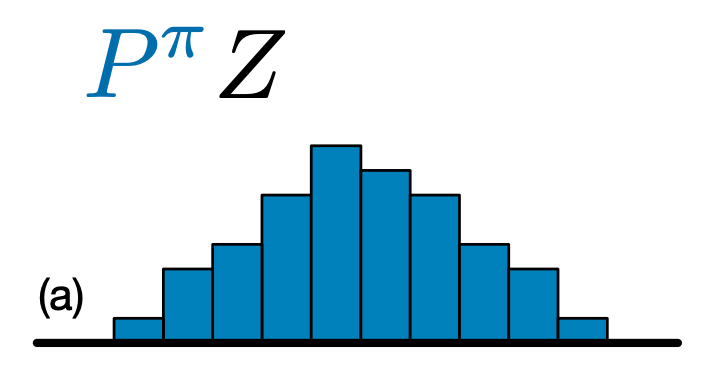
Ao aprender a distribuição ao invés de simplesmente o valor esperado, o algoritmo é capaz de ficar mais estável durante o treinamento, levando a um melhor desempenho final. Isso é particularmente verdadeiro em situações com distribuições de valores bimodais ou mesmo multimodais, onde uma única média não fornece uma imagem precisa.
Para treinar em distribuições de probabilidade em vez de em valores, C51 deve realizar alguns cálculos de distribuição complexos para calcular sua função de perda. Mas não se preocupe, tudo isso é cuidado para você no TF-Agents!
Para criar um agente C51, primeiro precisamos criar um CategoricalQNetwork . A API do CategoricalQNetwork é a mesma que a do QNetwork , exceto que não é um argumento adicional num_atoms . Isso representa o número de pontos de suporte em nossas estimativas de distribuição de probabilidade. (A imagem acima inclui 10 pontos de suporte, cada um representado por uma barra azul vertical.) Como você pode ver pelo nome, o número padrão de átomos é 51.
categorical_q_net = categorical_q_network.CategoricalQNetwork(
train_env.observation_spec(),
train_env.action_spec(),
num_atoms=num_atoms,
fc_layer_params=fc_layer_params)
Precisamos também de um optimizer para treinar a rede que acabou de criar, e uma train_step_counter variável para manter o controle de quantas vezes a rede foi atualizado.
Note-se que uma outra diferença significativa de baunilha DqnAgent é que agora precisa especificar min_q_value e max_q_value como argumentos. Eles especificam os valores mais extremos do suporte (em outras palavras, o mais extremo dos 51 átomos de cada lado). Certifique-se de escolhê-los apropriadamente para o seu ambiente específico. Aqui usamos -20 e 20.
optimizer = tf.compat.v1.train.AdamOptimizer(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = categorical_dqn_agent.CategoricalDqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
categorical_q_network=categorical_q_net,
optimizer=optimizer,
min_q_value=min_q_value,
max_q_value=max_q_value,
n_step_update=n_step_update,
td_errors_loss_fn=common.element_wise_squared_loss,
gamma=gamma,
train_step_counter=train_step_counter)
agent.initialize()
Uma última coisa a notar é que nós também adicionamos um argumento para atualizações uso n passo com \(n\) = 2. Em uma única etapa de ensino-Q (\(n\) = 1), só calcular o erro entre os valores de Q na etapa de tempo atual e na próxima etapa de tempo usando o retorno de etapa única (com base na equação de otimização de Bellman). O retorno de uma única etapa é definido como:
\(G_t = R_{t + 1} + \gamma V(s_{t + 1})\)
onde definimos \(V(s) = \max_a{Q(s, a)}\).
Atualizações N-passo envolver a expansão da função de etapa única retorno padrão \(n\) vezes:
\(G_t^n = R_{t + 1} + \gamma R_{t + 2} + \gamma^2 R_{t + 3} + \dots + \gamma^n V(s_{t + n})\)
Atualizações N-passo habilitar o agente para o arranque de mais no futuro, e com o valor correto de \(n\), isso muitas vezes leva a aprender mais rápido.
Embora atualizações C51 e n-Step são muitas vezes combinados com repetição priorizada para formar o núcleo do agente do arco-íris , vimos nenhuma melhoria mensurável da implementação repetição priorizados. Além disso, descobrimos que, ao combinar nosso agente C51 apenas com atualizações de n etapas, nosso agente tem um desempenho tão bom quanto outros agentes Rainbow na amostra de ambientes Atari que testamos.
Métricas e Avaliação
A métrica mais comum usada para avaliar uma política é o retorno médio. O retorno é a soma das recompensas obtidas durante a execução de uma política em um ambiente para um episódio, e normalmente fazemos a média disso em alguns episódios. Podemos calcular a métrica de retorno médio da seguinte maneira.
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
compute_avg_return(eval_env, random_policy, num_eval_episodes)
# Please also see the metrics module for standard implementations of different
# metrics.
20.0
Coleção de dados
Como no tutorial DQN, configure o buffer de reprodução e a coleta de dados inicial com a política aleatória.
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=agent.collect_data_spec,
batch_size=train_env.batch_size,
max_length=replay_buffer_capacity)
def collect_step(environment, policy):
time_step = environment.current_time_step()
action_step = policy.action(time_step)
next_time_step = environment.step(action_step.action)
traj = trajectory.from_transition(time_step, action_step, next_time_step)
# Add trajectory to the replay buffer
replay_buffer.add_batch(traj)
for _ in range(initial_collect_steps):
collect_step(train_env, random_policy)
# This loop is so common in RL, that we provide standard implementations of
# these. For more details see the drivers module.
# Dataset generates trajectories with shape [BxTx...] where
# T = n_step_update + 1.
dataset = replay_buffer.as_dataset(
num_parallel_calls=3, sample_batch_size=batch_size,
num_steps=n_step_update + 1).prefetch(3)
iterator = iter(dataset)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/data/experimental/ops/counter.py:66: scan (from tensorflow.python.data.experimental.ops.scan_ops) is deprecated and will be removed in a future version. Instructions for updating: Use `tf.data.Dataset.scan(...) instead WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/autograph/impl/api.py:382: ReplayBuffer.get_next (from tf_agents.replay_buffers.replay_buffer) is deprecated and will be removed in a future version. Instructions for updating: Use `as_dataset(..., single_deterministic_pass=False) instead.
Treinando o agente
O loop de treinamento envolve a coleta de dados do ambiente e a otimização das redes do agente. Ao longo do caminho, avaliaremos ocasionalmente a política do agente para ver como estamos nos saindo.
O procedimento a seguir levará cerca de 7 minutos para ser executado.
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
for _ in range(num_iterations):
# Collect a few steps using collect_policy and save to the replay buffer.
for _ in range(collect_steps_per_iteration):
collect_step(train_env, agent.collect_policy)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience)
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss.loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1:.2f}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/util/dispatch.py:206: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) step = 200: loss = 3.199000597000122 step = 400: loss = 2.083357810974121 step = 600: loss = 1.9901162385940552 step = 800: loss = 1.9055049419403076 step = 1000: loss = 1.7382612228393555 step = 1000: Average Return = 34.40 step = 1200: loss = 1.3624987602233887 step = 1400: loss = 1.548039197921753 step = 1600: loss = 1.4193217754364014 step = 1800: loss = 1.3339967727661133 step = 2000: loss = 1.1471226215362549 step = 2000: Average Return = 91.10 step = 2200: loss = 1.360352873802185 step = 2400: loss = 1.4253160953521729 step = 2600: loss = 0.9550995826721191 step = 2800: loss = 0.9822611808776855 step = 3000: loss = 1.0512573719024658 step = 3000: Average Return = 102.60 step = 3200: loss = 1.131516456604004 step = 3400: loss = 1.0834283828735352 step = 3600: loss = 0.8771724104881287 step = 3800: loss = 0.7854692935943604 step = 4000: loss = 0.7451740503311157 step = 4000: Average Return = 179.10 step = 4200: loss = 0.6963338851928711 step = 4400: loss = 0.8579068183898926 step = 4600: loss = 0.735978364944458 step = 4800: loss = 0.5723521709442139 step = 5000: loss = 0.6422518491744995 step = 5000: Average Return = 138.00 step = 5200: loss = 0.5242955684661865 step = 5400: loss = 0.869032621383667 step = 5600: loss = 0.7798122763633728 step = 5800: loss = 0.745892345905304 step = 6000: loss = 0.7540864944458008 step = 6000: Average Return = 155.80 step = 6200: loss = 0.6851651668548584 step = 6400: loss = 0.7417727112770081 step = 6600: loss = 0.7385923862457275 step = 6800: loss = 0.8823254108428955 step = 7000: loss = 0.6216408014297485 step = 7000: Average Return = 146.90 step = 7200: loss = 0.3905255198478699 step = 7400: loss = 0.5030156373977661 step = 7600: loss = 0.6326021552085876 step = 7800: loss = 0.6071780920028687 step = 8000: loss = 0.49069637060165405 step = 8000: Average Return = 332.70 step = 8200: loss = 0.7194125056266785 step = 8400: loss = 0.7707428932189941 step = 8600: loss = 0.42258384823799133 step = 8800: loss = 0.5215793251991272 step = 9000: loss = 0.6949542164802551 step = 9000: Average Return = 174.10 step = 9200: loss = 0.7312793731689453 step = 9400: loss = 0.5663323402404785 step = 9600: loss = 0.8518731594085693 step = 9800: loss = 0.5256152153015137 step = 10000: loss = 0.578148603439331 step = 10000: Average Return = 147.40 step = 10200: loss = 0.46965712308883667 step = 10400: loss = 0.5685954093933105 step = 10600: loss = 0.5819060802459717 step = 10800: loss = 0.792033851146698 step = 11000: loss = 0.5804982781410217 step = 11000: Average Return = 186.80 step = 11200: loss = 0.4973406195640564 step = 11400: loss = 0.33229681849479675 step = 11600: loss = 0.5267124176025391 step = 11800: loss = 0.585414469242096 step = 12000: loss = 0.6697092652320862 step = 12000: Average Return = 135.30 step = 12200: loss = 0.30732017755508423 step = 12400: loss = 0.490392804145813 step = 12600: loss = 0.28014713525772095 step = 12800: loss = 0.456543892621994 step = 13000: loss = 0.48237597942352295 step = 13000: Average Return = 182.70 step = 13200: loss = 0.5447070598602295 step = 13400: loss = 0.4602382481098175 step = 13600: loss = 0.5659506320953369 step = 13800: loss = 0.47906267642974854 step = 14000: loss = 0.4060840904712677 step = 14000: Average Return = 153.00 step = 14200: loss = 0.6457054018974304 step = 14400: loss = 0.4795544147491455 step = 14600: loss = 0.16895757615566254 step = 14800: loss = 0.5005109906196594 step = 15000: loss = 0.5339224338531494 step = 15000: Average Return = 165.10
Visualização
Enredos
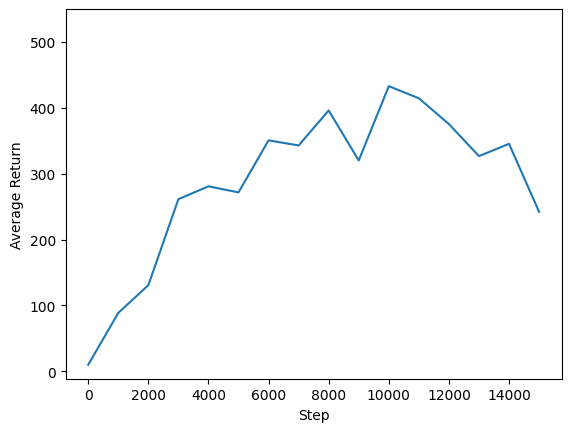
Podemos traçar o retorno versus as etapas globais para ver o desempenho de nosso agente. Em Cartpole-v1 , o ambiente dá uma recompensa de +1 para cada passo de tempo as estadias pólo, e uma vez que o número máximo de etapas é de 500, o máximo retorno possível é também 500.
steps = range(0, num_iterations + 1, eval_interval)
plt.plot(steps, returns)
plt.ylabel('Average Return')
plt.xlabel('Step')
plt.ylim(top=550)
(19.485000991821288, 550.0)
Vídeos
É útil visualizar o desempenho de um agente, renderizando o ambiente em cada etapa. Antes de fazermos isso, vamos primeiro criar uma função para incorporar vídeos neste colab.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
O código a seguir visualiza a política do agente para alguns episódios:
num_episodes = 3
video_filename = 'imageio.mp4'
with imageio.get_writer(video_filename, fps=60) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = agent.policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
embed_mp4(video_filename)
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x5646eec183c0] Warning: data is not aligned! This can lead to a speed loss
O C51 tende a se sair um pouco melhor do que o DQN no CartPole-v1, mas a diferença entre os dois agentes se torna cada vez mais significativa em ambientes cada vez mais complexos. Por exemplo, no benchmark Atari 2600 completo, C51 demonstra uma melhoria de pontuação média de 126% sobre DQN após normalizar em relação a um agente aleatório. Melhorias adicionais podem ser obtidas incluindo atualizações de n etapas.
Para um mergulho mais profundo no algoritmo C51, ver uma perspectiva distributiva em Aprendizagem por Reforço (2017) .