
זכויות יוצרים 2021 מחברי TF-Agents.
| | |  צפה במקור ב-GitHub צפה במקור ב-GitHub | |
מבוא
מופעי דוגמא זו איך לאמן DQN קטגוריאלי (C51) סוכן על סביבת Cartpole באמצעות הספרייה-סוכני TF.
ודא שאתה תסתכל דרך הדרכת DQN כתנאי מוקדם. הדרכה זו תניח היכרות עם המדריך של DQN; הוא יתמקד בעיקר בהבדלים בין DQN ל-C51.
להכין
אם עדיין לא התקנת tf-agents, הרץ:
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agentspip install pyglet
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import PIL.Image
import pyvirtualdisplay
import tensorflow as tf
from tf_agents.agents.categorical_dqn import categorical_dqn_agent
from tf_agents.drivers import dynamic_step_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import categorical_q_network
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import tf_uniform_replay_buffer
from tf_agents.trajectories import trajectory
from tf_agents.utils import common
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
היפרפרמטרים
env_name = "CartPole-v1" # @param {type:"string"}
num_iterations = 15000 # @param {type:"integer"}
initial_collect_steps = 1000 # @param {type:"integer"}
collect_steps_per_iteration = 1 # @param {type:"integer"}
replay_buffer_capacity = 100000 # @param {type:"integer"}
fc_layer_params = (100,)
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
gamma = 0.99
log_interval = 200 # @param {type:"integer"}
num_atoms = 51 # @param {type:"integer"}
min_q_value = -20 # @param {type:"integer"}
max_q_value = 20 # @param {type:"integer"}
n_step_update = 2 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
סביבה
טען את הסביבה כמו קודם, עם אחד לאימון ואחד להערכה. כאן אנו משתמשים ב-CartPole-v1 (לעומת CartPole-v0 במדריך DQN), שיש לו תגמול מרבי גדול יותר של 500 במקום 200.
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
סוֹכֵן
C51 הוא אלגוריתם Q-learning המבוסס על DQN. כמו DQN, ניתן להשתמש בו בכל סביבה עם מרחב פעולה נפרד.
ההבדל העיקרי בין C51 ל-DQN הוא שבמקום פשוט לחזות את ערך ה-Q עבור כל זוג מצב-פעולה, C51 מנבא מודל היסטוגרמה להתפלגות ההסתברות של ערך ה-Q:
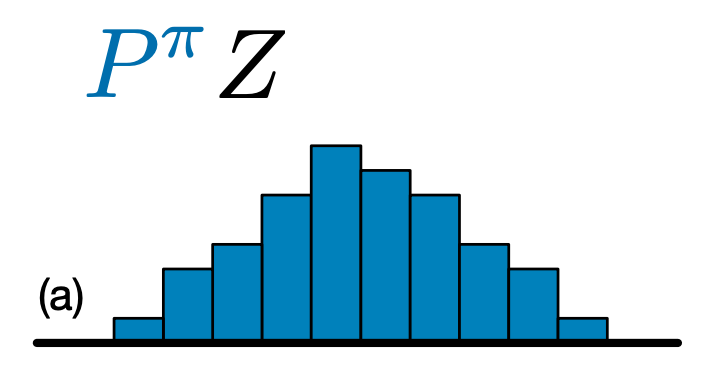
על ידי לימוד ההתפלגות ולא רק את הערך הצפוי, האלגוריתם מסוגל להישאר יציב יותר במהלך האימון, מה שמוביל לשיפור הביצועים הסופיים. זה נכון במיוחד במצבים עם התפלגות ערכים בי-מודאלית או אפילו מולטי-מודאלית, שבהם ממוצע בודד אינו מספק תמונה מדויקת.
כדי להתאמן על התפלגויות הסתברות ולא על ערכים, C51 חייב לבצע כמה חישובי התפלגות מורכבים כדי לחשב את פונקציית ההפסד שלו. אבל אל דאגה, כל זה מטופל עבורך ב-TF-Agents!
כדי ליצור סוכן C51, אנחנו קודם צריכים ליצור CategoricalQNetwork . ה- API של CategoricalQNetwork הוא זהה לזה של QNetwork , חוץ מזה אין ויכוח נוסף num_atoms . זה מייצג את מספר נקודות התמיכה בהערכות התפלגות ההסתברות שלנו. (התמונה שלמעלה כוללת 10 נקודות תמיכה, כל אחת מיוצגת על ידי פס כחול אנכי.) כפי שניתן לראות מהשם, מספר האטומים המוגדר כברירת מחדל הוא 51.
categorical_q_net = categorical_q_network.CategoricalQNetwork(
train_env.observation_spec(),
train_env.action_spec(),
num_atoms=num_atoms,
fc_layer_params=fc_layer_params)
אנחנו גם צריכים optimizer להכשיר את הרשת שיצרנו כרגע, וכן train_step_counter משתנה כדי לעקוב אחר כמה פעמים את הרשת עודכנה.
הערה כי הבדל משמעותי אחד אחר מן הווניל DqnAgent הוא שאנחנו עכשיו צריכים לציין min_q_value ו max_q_value כמו ויכוחים. אלה מציינים את הערכים הקיצוניים ביותר של התמיכה (במילים אחרות, הקיצוני ביותר מבין 51 האטומים משני הצדדים). הקפד לבחור אלה כראוי עבור הסביבה הספציפית שלך. כאן אנו משתמשים ב-20 ו-20.
optimizer = tf.compat.v1.train.AdamOptimizer(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = categorical_dqn_agent.CategoricalDqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
categorical_q_network=categorical_q_net,
optimizer=optimizer,
min_q_value=min_q_value,
max_q_value=max_q_value,
n_step_update=n_step_update,
td_errors_loss_fn=common.element_wise_squared_loss,
gamma=gamma,
train_step_counter=train_step_counter)
agent.initialize()
דבר אחד אחרון לציין כי גם הוספנו ויכוח על השימוש n-צעד עדכונים עם \(n\) = 2. Q-למידה-צעד יחיד (\(n\) = 1), אנחנו רק לחשב את השגיאה בין-ערכי Q בשלב הזמן הנוכחי ובשלב הזמן הבא באמצעות החזרה חד-שלבית (בהתבסס על משוואת האופטימיות של בלמן). החזר שלב אחד מוגדר כ:
\(G_t = R_{t + 1} + \gamma V(s_{t + 1})\)
בהם נגדיר \(V(s) = \max_a{Q(s, a)}\).
עדכונים N-צעד כרוך בהרחבת בשלב יחיד בתמורה תקן פונקציה \(n\) פעמים:
\(G_t^n = R_{t + 1} + \gamma R_{t + 2} + \gamma^2 R_{t + 3} + \dots + \gamma^n V(s_{t + n})\)
עדכוני N-צעד לאפשר לסוכן אתחול ממנו עוד יותר בעתיד, ועם הערך התקין של \(n\), לעתים קרובות זה מוביל למידה מהירה.
למרות עדכוני C51 ו- n-צעד משולבים לעתים קרובות עם שידור חוזר מועדף כדי ליצור את הליבה של סוכן הקשת , ראינו שום שיפור מדיד מיישום חוזר עדיף. יתרה מכך, אנו מוצאים שכאשר אנו משלבים את סוכן C51 שלנו עם עדכונים ב-n-step בלבד, הסוכן שלנו מתפקד טוב כמו סוכני Rainbow אחרים במדגם של סביבות Atari שבדקנו.
מדדים והערכה
המדד הנפוץ ביותר המשמש להערכת פוליסה הוא התשואה הממוצעת. ההחזר הוא סכום התגמולים שהושגו בעת הפעלת פוליסה בסביבה עבור פרק, ובדרך כלל אנו ממוצעים זאת על פני מספר פרקים. אנו יכולים לחשב את מדד התשואה הממוצעת באופן הבא.
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
compute_avg_return(eval_env, random_policy, num_eval_episodes)
# Please also see the metrics module for standard implementations of different
# metrics.
20.0
איסוף נתונים
כמו במדריך DQN, הגדר את מאגר ההשמעה החוזר ואת איסוף הנתונים הראשוני עם המדיניות האקראית.
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=agent.collect_data_spec,
batch_size=train_env.batch_size,
max_length=replay_buffer_capacity)
def collect_step(environment, policy):
time_step = environment.current_time_step()
action_step = policy.action(time_step)
next_time_step = environment.step(action_step.action)
traj = trajectory.from_transition(time_step, action_step, next_time_step)
# Add trajectory to the replay buffer
replay_buffer.add_batch(traj)
for _ in range(initial_collect_steps):
collect_step(train_env, random_policy)
# This loop is so common in RL, that we provide standard implementations of
# these. For more details see the drivers module.
# Dataset generates trajectories with shape [BxTx...] where
# T = n_step_update + 1.
dataset = replay_buffer.as_dataset(
num_parallel_calls=3, sample_batch_size=batch_size,
num_steps=n_step_update + 1).prefetch(3)
iterator = iter(dataset)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/data/experimental/ops/counter.py:66: scan (from tensorflow.python.data.experimental.ops.scan_ops) is deprecated and will be removed in a future version. Instructions for updating: Use `tf.data.Dataset.scan(...) instead WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/autograph/impl/api.py:382: ReplayBuffer.get_next (from tf_agents.replay_buffers.replay_buffer) is deprecated and will be removed in a future version. Instructions for updating: Use `as_dataset(..., single_deterministic_pass=False) instead.
הכשרת הסוכן
לולאת ההדרכה כוללת גם איסוף נתונים מהסביבה וגם ייעול רשתות הסוכן. לאורך הדרך, מדי פעם נעריך את מדיניות הסוכן כדי לראות מה שלומנו.
להלן ייקח ~7 דקות לרוץ.
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
for _ in range(num_iterations):
# Collect a few steps using collect_policy and save to the replay buffer.
for _ in range(collect_steps_per_iteration):
collect_step(train_env, agent.collect_policy)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience)
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss.loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1:.2f}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/util/dispatch.py:206: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) step = 200: loss = 3.199000597000122 step = 400: loss = 2.083357810974121 step = 600: loss = 1.9901162385940552 step = 800: loss = 1.9055049419403076 step = 1000: loss = 1.7382612228393555 step = 1000: Average Return = 34.40 step = 1200: loss = 1.3624987602233887 step = 1400: loss = 1.548039197921753 step = 1600: loss = 1.4193217754364014 step = 1800: loss = 1.3339967727661133 step = 2000: loss = 1.1471226215362549 step = 2000: Average Return = 91.10 step = 2200: loss = 1.360352873802185 step = 2400: loss = 1.4253160953521729 step = 2600: loss = 0.9550995826721191 step = 2800: loss = 0.9822611808776855 step = 3000: loss = 1.0512573719024658 step = 3000: Average Return = 102.60 step = 3200: loss = 1.131516456604004 step = 3400: loss = 1.0834283828735352 step = 3600: loss = 0.8771724104881287 step = 3800: loss = 0.7854692935943604 step = 4000: loss = 0.7451740503311157 step = 4000: Average Return = 179.10 step = 4200: loss = 0.6963338851928711 step = 4400: loss = 0.8579068183898926 step = 4600: loss = 0.735978364944458 step = 4800: loss = 0.5723521709442139 step = 5000: loss = 0.6422518491744995 step = 5000: Average Return = 138.00 step = 5200: loss = 0.5242955684661865 step = 5400: loss = 0.869032621383667 step = 5600: loss = 0.7798122763633728 step = 5800: loss = 0.745892345905304 step = 6000: loss = 0.7540864944458008 step = 6000: Average Return = 155.80 step = 6200: loss = 0.6851651668548584 step = 6400: loss = 0.7417727112770081 step = 6600: loss = 0.7385923862457275 step = 6800: loss = 0.8823254108428955 step = 7000: loss = 0.6216408014297485 step = 7000: Average Return = 146.90 step = 7200: loss = 0.3905255198478699 step = 7400: loss = 0.5030156373977661 step = 7600: loss = 0.6326021552085876 step = 7800: loss = 0.6071780920028687 step = 8000: loss = 0.49069637060165405 step = 8000: Average Return = 332.70 step = 8200: loss = 0.7194125056266785 step = 8400: loss = 0.7707428932189941 step = 8600: loss = 0.42258384823799133 step = 8800: loss = 0.5215793251991272 step = 9000: loss = 0.6949542164802551 step = 9000: Average Return = 174.10 step = 9200: loss = 0.7312793731689453 step = 9400: loss = 0.5663323402404785 step = 9600: loss = 0.8518731594085693 step = 9800: loss = 0.5256152153015137 step = 10000: loss = 0.578148603439331 step = 10000: Average Return = 147.40 step = 10200: loss = 0.46965712308883667 step = 10400: loss = 0.5685954093933105 step = 10600: loss = 0.5819060802459717 step = 10800: loss = 0.792033851146698 step = 11000: loss = 0.5804982781410217 step = 11000: Average Return = 186.80 step = 11200: loss = 0.4973406195640564 step = 11400: loss = 0.33229681849479675 step = 11600: loss = 0.5267124176025391 step = 11800: loss = 0.585414469242096 step = 12000: loss = 0.6697092652320862 step = 12000: Average Return = 135.30 step = 12200: loss = 0.30732017755508423 step = 12400: loss = 0.490392804145813 step = 12600: loss = 0.28014713525772095 step = 12800: loss = 0.456543892621994 step = 13000: loss = 0.48237597942352295 step = 13000: Average Return = 182.70 step = 13200: loss = 0.5447070598602295 step = 13400: loss = 0.4602382481098175 step = 13600: loss = 0.5659506320953369 step = 13800: loss = 0.47906267642974854 step = 14000: loss = 0.4060840904712677 step = 14000: Average Return = 153.00 step = 14200: loss = 0.6457054018974304 step = 14400: loss = 0.4795544147491455 step = 14600: loss = 0.16895757615566254 step = 14800: loss = 0.5005109906196594 step = 15000: loss = 0.5339224338531494 step = 15000: Average Return = 165.10
רְאִיָה
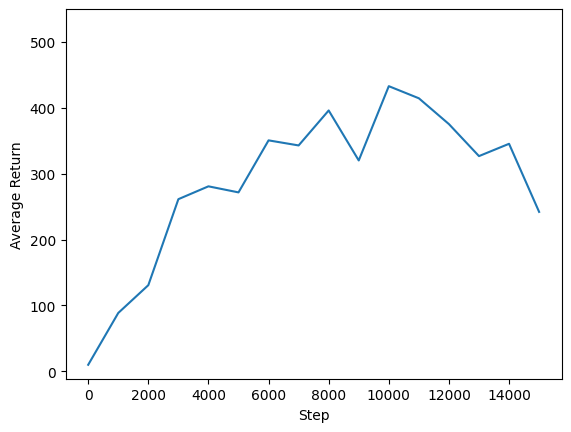
עלילות
אנחנו יכולים לתכנן תשואה לעומת צעדים גלובליים כדי לראות את הביצועים של הסוכן שלנו. בשינה Cartpole-v1 , הסביבה נותנת גמול של 1 לכול צעד זמן נשאר המוט למעלה, ומאז המספר המרבי של צעדים הוא 500, את ההחזר המקסימאלי האפשרי הוא גם 500.
steps = range(0, num_iterations + 1, eval_interval)
plt.plot(steps, returns)
plt.ylabel('Average Return')
plt.xlabel('Step')
plt.ylim(top=550)
(19.485000991821288, 550.0)
סרטונים
זה מועיל לדמיין את הביצועים של סוכן על ידי עיבוד הסביבה בכל שלב. לפני שנעשה זאת, תחילה ניצור פונקציה להטמעת סרטונים בקולאב הזה.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
הקוד הבא מדגים את המדיניות של הסוכן לכמה פרקים:
num_episodes = 3
video_filename = 'imageio.mp4'
with imageio.get_writer(video_filename, fps=60) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = agent.policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
embed_mp4(video_filename)
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x5646eec183c0] Warning: data is not aligned! This can lead to a speed loss
C51 נוטה להצליח מעט יותר מ-DQN ב-CartPole-v1, אבל ההבדל בין שני הסוכנים הופך משמעותי יותר ויותר בסביבות מורכבות יותר ויותר. לדוגמה, במדד Atari 2600 המלא, C51 מדגים שיפור ציון ממוצע של 126% בהשוואה ל-DQN לאחר נורמליזציה ביחס לגורם אקראי. ניתן להשיג שיפורים נוספים על ידי הכללת עדכונים ב-n-step.
לצלילה עמוקה יותר לתוך אלגוריתם C51, לראות חלוקתי פרספקטיבה על לימוד עם חיזוקים (2017) .