
Telif Hakkı 2021 TF-Agents Yazarları.
| | |  Kaynağı GitHub'da görüntüleyin Kaynağı GitHub'da görüntüleyin | |
Tanıtım
Bir tren nasıl Bu örnek DQN (Derin Q Ağ) TF-Ajanlar kütüphanesi kullanılarak Cartpole çevreye madde.

Eğitim, değerlendirme ve veri toplama için Reinforcement Learning (RL) boru hattındaki tüm bileşenlerde size yol gösterecektir.
Bu kodu canlı olarak çalıştırmak için yukarıdaki 'Google Colab'da Çalıştır' bağlantısını tıklayın.
Kurmak
Aşağıdaki bağımlılıkları yüklemediyseniz, çalıştırın:
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agents[reverb]pip install pyglet
from __future__ import absolute_import, division, print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import PIL.Image
import pyvirtualdisplay
import reverb
import tensorflow as tf
from tf_agents.agents.dqn import dqn_agent
from tf_agents.drivers import py_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import sequential
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.trajectories import trajectory
from tf_agents.specs import tensor_spec
from tf_agents.utils import common
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
tf.version.VERSION
'2.6.0'
hiperparametreler
num_iterations = 20000 # @param {type:"integer"}
initial_collect_steps = 100 # @param {type:"integer"}
collect_steps_per_iteration = 1# @param {type:"integer"}
replay_buffer_max_length = 100000 # @param {type:"integer"}
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
log_interval = 200 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
Çevre
Reinforcement Learning'de (RL), bir ortam, çözülmesi gereken görevi veya sorunu temsil eder. Standart ortamlar kullanılarak TF-Ajanlar oluşturulabilir tf_agents.environments süit. TF-Agents, OpenAI Gym, Atari ve DM Control gibi kaynaklardan ortamları yüklemek için paketlere sahiptir.
OpenAI Gym paketinden CartPole ortamını yükleyin.
env_name = 'CartPole-v0'
env = suite_gym.load(env_name)
Nasıl göründüğünü görmek için bu ortamı oluşturabilirsiniz. Bir arabaya serbest sallanan bir direk bağlanmıştır. Amaç, direği yukarı bakacak şekilde tutmak için arabayı sağa veya sola hareket ettirmektir.
env.reset()
PIL.Image.fromarray(env.render())
environment.step yöntemi alır action ortamında ve bir döner TimeStep ortamının bir sonraki gözlem ve eylem için ödül içeren başlığın.
time_step_spec() metodu için şartname döner TimeStep tuple. Bu observation özellik gösterir gözlemler şekli, veri tipleri ve izin verilen değer aralıkları. reward niteliği ödül için aynı ayrıntılarını gösterir.
print('Observation Spec:')
print(env.time_step_spec().observation)
Observation Spec:
BoundedArraySpec(shape=(4,), dtype=dtype('float32'), name='observation', minimum=[-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38], maximum=[4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38])
print('Reward Spec:')
print(env.time_step_spec().reward)
Reward Spec:
ArraySpec(shape=(), dtype=dtype('float32'), name='reward')
action_spec() metodu şekli, veri tipleri ve geçerli işlemlerden izin değerler verir.
print('Action Spec:')
print(env.action_spec())
Action Spec:
BoundedArraySpec(shape=(), dtype=dtype('int64'), name='action', minimum=0, maximum=1)
Cartpole ortamında:
-
observation4 yüzen bir dizidir:- arabanın konumu ve hızı
- direğin açısal konumu ve hızı
-
rewardbir skaler şamandıra değeridir -
actionsadece iki olası değerlere sahip bir sayıl tam sayıdır:-
0- "hareket sol" -
1- "hareket herkesi"
-
time_step = env.reset()
print('Time step:')
print(time_step)
action = np.array(1, dtype=np.int32)
next_time_step = env.step(action)
print('Next time step:')
print(next_time_step)
Time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02109759, -0.00062286, 0.04167245, -0.03825747], dtype=float32),
'reward': array(0., dtype=float32),
'step_type': array(0, dtype=int32)})
Next time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02111005, 0.1938775 , 0.0409073 , -0.31750655], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)})
Genellikle iki ortam somutlaştırılır: biri eğitim ve diğeri değerlendirme için.
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
Cartpole ortamı, çoğu ortam gibi saf Python ile yazılmıştır. Bu, başlangıç TensorFlow dönüştürülür TFPyEnvironment sarıcı.
Orijinal ortamın API'si Numpy dizilerini kullanır. TFPyEnvironment için dönüştürür bu Tensors Tensorflow ajanları ve politikaları ile uyumlu hale getirmek için.
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
Ajan
Bir RL sorunu çözmek için kullanılan algoritma, bir ile temsil edilir Agent . TF-Ajanlar çeşitli standart uygulamaları sağlar Agents , aşağıdakileri içerir:
DQN aracısı, ayrı bir eylem alanına sahip herhangi bir ortamda kullanılabilir.
Bir DQN Ajan kalbinde bir olan QNetwork , tahmin öğrenebilir bir sinir ağı modeli QValues çevreden bir gözlem verilen bütün eylemler için (beklenen getiriler).
Biz kullanacağız tf_agents.networks. Bir oluşturmak için QNetwork . Ağ, bir dizi oluşacak tf.keras.layers.Dense son kat olası her işlem için 1 çıkışı olacaktır tabakalar.
fc_layer_params = (100, 50)
action_tensor_spec = tensor_spec.from_spec(env.action_spec())
num_actions = action_tensor_spec.maximum - action_tensor_spec.minimum + 1
# Define a helper function to create Dense layers configured with the right
# activation and kernel initializer.
def dense_layer(num_units):
return tf.keras.layers.Dense(
num_units,
activation=tf.keras.activations.relu,
kernel_initializer=tf.keras.initializers.VarianceScaling(
scale=2.0, mode='fan_in', distribution='truncated_normal'))
# QNetwork consists of a sequence of Dense layers followed by a dense layer
# with `num_actions` units to generate one q_value per available action as
# its output.
dense_layers = [dense_layer(num_units) for num_units in fc_layer_params]
q_values_layer = tf.keras.layers.Dense(
num_actions,
activation=None,
kernel_initializer=tf.keras.initializers.RandomUniform(
minval=-0.03, maxval=0.03),
bias_initializer=tf.keras.initializers.Constant(-0.2))
q_net = sequential.Sequential(dense_layers + [q_values_layer])
Şimdi kullanmak tf_agents.agents.dqn.dqn_agent bir örneğini DqnAgent . Ek olarak time_step_spec , action_spec ve QNetwork, madde kurucu de (bu durumda, bir en iyi duruma gerektirir AdamOptimizer ), bir kayıp fonksiyonunu ve bir tamsayıdır adım sayacı.
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = dqn_agent.DqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
q_network=q_net,
optimizer=optimizer,
td_errors_loss_fn=common.element_wise_squared_loss,
train_step_counter=train_step_counter)
agent.initialize()
Politikalar
Politika, bir aracının bir ortamda nasıl hareket ettiğini tanımlar. Tipik olarak, pekiştirmeli öğrenmenin amacı, politika istenen sonucu üretene kadar temel modeli eğitmektir.
Bu eğitimde:
- Arzu edilen sonuç, direği araba üzerinde dik olarak dengede tutmaktır.
- Politika her biri için (sol veya sağ) bir eylem döndüren
time_stepgözlem.
Aracılar iki ilke içerir:
-
agent.policy- değerlendirme ve dağıtımda kullanılan ana politikası. -
agent.collect_policy- veri toplama için kullanılan bir ikinci politikası.
eval_policy = agent.policy
collect_policy = agent.collect_policy
Politikalar aracılardan bağımsız olarak oluşturulabilir. Örneğin, kullanmak tf_agents.policies.random_tf_policy rastgele her biri için bir eylem seçecektir bir ilke oluşturmak için time_step .
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
Bir politikasından bir eylem almak için çağrı policy.action(time_step) yöntemini. time_step ortamından kaydını içerir. Bu yöntem döndürür PolicyStep üç bileşenleri ile adlandırılmış başlık olur,:
-
action- alınması işlemi (bu durumda,0ya da1) -
state- durum bilgisi için kullanılan politikaları (olduğu RNN bazlı) -
info- Böyle eylemleri kaydı olasılıkları gibi yardımcı veriler,
example_environment = tf_py_environment.TFPyEnvironment(
suite_gym.load('CartPole-v0'))
time_step = example_environment.reset()
random_policy.action(time_step)
PolicyStep(action=<tf.Tensor: shape=(1,), dtype=int64, numpy=array([1])>, state=(), info=())
Metrikler ve Değerlendirme
Bir politikayı değerlendirmek için kullanılan en yaygın ölçüm ortalama getiridir. Geri dönüş, bir bölüm için bir ortamda bir ilke çalıştırırken elde edilen ödüllerin toplamıdır. Birkaç bölüm çalıştırılarak ortalama bir getiri elde edilir.
Aşağıdaki işlev, ilke, ortam ve bir dizi bölüm verilen bir ilkenin ortalama getirisini hesaplar.
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
# See also the metrics module for standard implementations of different metrics.
# https://github.com/tensorflow/agents/tree/master/tf_agents/metrics
Bu hesaplama Running random_policy ortamında bir başlangıç performansını gösterir.
compute_avg_return(eval_env, random_policy, num_eval_episodes)
20.7
Tekrar arabelleği
Çevreden toplanan verilerin takip etmek amacıyla, kullanacağı Reverb , Deepmind etkin, genişletilebilir ve kolay kullanımlı yeniden oynatma sistemi. Yörüngeleri topladığımızda deneyim verilerini depolar ve eğitim sırasında tüketilir.
Bu yeniden yürütme arabelleği, ajan.collect_data_spec kullanılarak ajandan alınabilen, saklanacak tensörleri açıklayan özellikler kullanılarak oluşturulur.
table_name = 'uniform_table'
replay_buffer_signature = tensor_spec.from_spec(
agent.collect_data_spec)
replay_buffer_signature = tensor_spec.add_outer_dim(
replay_buffer_signature)
table = reverb.Table(
table_name,
max_size=replay_buffer_max_length,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1),
signature=replay_buffer_signature)
reverb_server = reverb.Server([table])
replay_buffer = reverb_replay_buffer.ReverbReplayBuffer(
agent.collect_data_spec,
table_name=table_name,
sequence_length=2,
local_server=reverb_server)
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
replay_buffer.py_client,
table_name,
sequence_length=2)
[reverb/cc/platform/tfrecord_checkpointer.cc:150] Initializing TFRecordCheckpointer in /tmp/tmpcz7e0i7c. [reverb/cc/platform/tfrecord_checkpointer.cc:385] Loading latest checkpoint from /tmp/tmpcz7e0i7c [reverb/cc/platform/default/server.cc:71] Started replay server on port 21909
En ajanlar için collect_data_spec adında bir adlandırılmış başlık olur Trajectory gözlemler, eylemler, ödüller ve diğer öğeler için gözlük içeren,.
agent.collect_data_spec
Trajectory(
{'action': BoundedTensorSpec(shape=(), dtype=tf.int64, name='action', minimum=array(0), maximum=array(1)),
'discount': BoundedTensorSpec(shape=(), dtype=tf.float32, name='discount', minimum=array(0., dtype=float32), maximum=array(1., dtype=float32)),
'next_step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'observation': BoundedTensorSpec(shape=(4,), dtype=tf.float32, name='observation', minimum=array([-4.8000002e+00, -3.4028235e+38, -4.1887903e-01, -3.4028235e+38],
dtype=float32), maximum=array([4.8000002e+00, 3.4028235e+38, 4.1887903e-01, 3.4028235e+38],
dtype=float32)),
'policy_info': (),
'reward': TensorSpec(shape=(), dtype=tf.float32, name='reward'),
'step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type')})
agent.collect_data_spec._fields
('step_type',
'observation',
'action',
'policy_info',
'next_step_type',
'reward',
'discount')
Veri toplama
Şimdi, verileri yeniden oynatma arabelleğine kaydederek, birkaç adım için ortamda rastgele politikayı yürütün.
Burada deneyim toplama döngüsünü çalıştırmak için 'PyDriver' kullanıyoruz. Bizim daha TF Ajanlar sürücüsü hakkında bilgi edinebilirsiniz sürücüler öğretici .
py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
random_policy, use_tf_function=True),
[rb_observer],
max_steps=initial_collect_steps).run(train_py_env.reset())
(TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([ 0.04100575, 0.16847703, -0.12718087, -0.6300714 ], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)}),
())
Yeniden oynatma arabelleği artık bir Yörüngeler koleksiyonudur.
# For the curious:
# Uncomment to peel one of these off and inspect it.
# iter(replay_buffer.as_dataset()).next()
Aracının yeniden oynatma arabelleğine erişmesi gerekiyor. Bu bir iterable oluşturarak sağlanır tf.data.Dataset madde veri akışı olacak boru hattı.
Yeniden oynatma arabelleğinin her satırı yalnızca tek bir gözlem adımını depolar. DQN Ajan kaybını hesaplamak için hem mevcut ve gelecek gözlem ihtiyacı Fakat, veri kümesi boru hattı toplu (her öğe için iki komşu satırları örnek olacak num_steps=2 ).
Bu veri kümesi, paralel çağrılar çalıştırılarak ve verileri önceden getirerek optimize edilmiştir.
# Dataset generates trajectories with shape [Bx2x...]
dataset = replay_buffer.as_dataset(
num_parallel_calls=3,
sample_batch_size=batch_size,
num_steps=2).prefetch(3)
dataset
<PrefetchDataset shapes: (Trajectory(
{action: (64, 2),
discount: (64, 2),
next_step_type: (64, 2),
observation: (64, 2, 4),
policy_info: (),
reward: (64, 2),
step_type: (64, 2)}), SampleInfo(key=(64, 2), probability=(64, 2), table_size=(64, 2), priority=(64, 2))), types: (Trajectory(
{action: tf.int64,
discount: tf.float32,
next_step_type: tf.int32,
observation: tf.float32,
policy_info: (),
reward: tf.float32,
step_type: tf.int32}), SampleInfo(key=tf.uint64, probability=tf.float64, table_size=tf.int64, priority=tf.float64))>
iterator = iter(dataset)
print(iterator)
<tensorflow.python.data.ops.iterator_ops.OwnedIterator object at 0x7f3cec38cd90>
# For the curious:
# Uncomment to see what the dataset iterator is feeding to the agent.
# Compare this representation of replay data
# to the collection of individual trajectories shown earlier.
# iterator.next()
Temsilciyi eğitmek
Eğitim döngüsü sırasında iki şey gerçekleşmelidir:
- ortamdan veri toplamak
- aracının sinir ağlarını eğitmek için bu verileri kullanın
Bu örnek ayrıca politikayı periyodik olarak değerlendirir ve mevcut puanı yazdırır.
Aşağıdakilerin çalışması ~ 5 dakika sürecektir.
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step.
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
# Reset the environment.
time_step = train_py_env.reset()
# Create a driver to collect experience.
collect_driver = py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
agent.collect_policy, use_tf_function=True),
[rb_observer],
max_steps=collect_steps_per_iteration)
for _ in range(num_iterations):
# Collect a few steps and save to the replay buffer.
time_step, _ = collect_driver.run(time_step)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience).loss
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/util/dispatch.py:206: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. step = 200: loss = 27.080341339111328 step = 400: loss = 3.0314550399780273 step = 600: loss = 470.9187927246094 step = 800: loss = 548.7870483398438 step = 1000: loss = 4315.17578125 step = 1000: Average Return = 48.400001525878906 step = 1200: loss = 5297.24853515625 step = 1400: loss = 11601.296875 step = 1600: loss = 60482.578125 step = 1800: loss = 802764.8125 step = 2000: loss = 1689283.0 step = 2000: Average Return = 63.400001525878906 step = 2200: loss = 4928921.0 step = 2400: loss = 5508345.0 step = 2600: loss = 17888162.0 step = 2800: loss = 23993148.0 step = 3000: loss = 10192765.0 step = 3000: Average Return = 74.0999984741211 step = 3200: loss = 88318176.0 step = 3400: loss = 77485728.0 step = 3600: loss = 3236693504.0 step = 3800: loss = 102289840.0 step = 4000: loss = 168594496.0 step = 4000: Average Return = 73.5999984741211 step = 4200: loss = 348990528.0 step = 4400: loss = 101819664.0 step = 4600: loss = 136486208.0 step = 4800: loss = 133454864.0 step = 5000: loss = 592934784.0 step = 5000: Average Return = 71.5999984741211 step = 5200: loss = 216909120.0 step = 5400: loss = 181369648.0 step = 5600: loss = 600455680.0 step = 5800: loss = 551183744.0 step = 6000: loss = 368749824.0 step = 6000: Average Return = 83.5 step = 6200: loss = 1010418176.0 step = 6400: loss = 171257856.0 step = 6600: loss = 115424904.0 step = 6800: loss = 144941152.0 step = 7000: loss = 257932752.0 step = 7000: Average Return = 107.0 step = 7200: loss = 854109248.0 step = 7400: loss = 95970128.0 step = 7600: loss = 325583744.0 step = 7800: loss = 858134016.0 step = 8000: loss = 197960128.0 step = 8000: Average Return = 124.19999694824219 step = 8200: loss = 310187552.0 step = 8400: loss = 572293760.0 step = 8600: loss = 2338323456.0 step = 8800: loss = 384659392.0 step = 9000: loss = 676924544.0 step = 9000: Average Return = 200.0 step = 9200: loss = 946199168.0 step = 9400: loss = 605189504.0 step = 9600: loss = 768988928.0 step = 9800: loss = 508231776.0 step = 10000: loss = 526518016.0 step = 10000: Average Return = 200.0 step = 10200: loss = 1461528704.0 step = 10400: loss = 709822016.0 step = 10600: loss = 2770553344.0 step = 10800: loss = 496421504.0 step = 11000: loss = 1822116864.0 step = 11000: Average Return = 200.0 step = 11200: loss = 744854208.0 step = 11400: loss = 778800384.0 step = 11600: loss = 667049216.0 step = 11800: loss = 586587648.0 step = 12000: loss = 2586833920.0 step = 12000: Average Return = 200.0 step = 12200: loss = 1002041472.0 step = 12400: loss = 1526919552.0 step = 12600: loss = 1670877056.0 step = 12800: loss = 1857608704.0 step = 13000: loss = 1040727936.0 step = 13000: Average Return = 200.0 step = 13200: loss = 1807798656.0 step = 13400: loss = 1457996544.0 step = 13600: loss = 1322671616.0 step = 13800: loss = 22940983296.0 step = 14000: loss = 1556422912.0 step = 14000: Average Return = 200.0 step = 14200: loss = 2488473600.0 step = 14400: loss = 46558289920.0 step = 14600: loss = 1958968960.0 step = 14800: loss = 4677744640.0 step = 15000: loss = 1648418304.0 step = 15000: Average Return = 200.0 step = 15200: loss = 46132723712.0 step = 15400: loss = 2189093888.0 step = 15600: loss = 1204941056.0 step = 15800: loss = 1578462080.0 step = 16000: loss = 1695949312.0 step = 16000: Average Return = 200.0 step = 16200: loss = 19554553856.0 step = 16400: loss = 2857277184.0 step = 16600: loss = 5782225408.0 step = 16800: loss = 2294467072.0 step = 17000: loss = 2397877248.0 step = 17000: Average Return = 200.0 step = 17200: loss = 2910329088.0 step = 17400: loss = 6317301760.0 step = 17600: loss = 2733602048.0 step = 17800: loss = 32502740992.0 step = 18000: loss = 6295858688.0 step = 18000: Average Return = 200.0 step = 18200: loss = 2564860160.0 step = 18400: loss = 76450430976.0 step = 18600: loss = 6347636736.0 step = 18800: loss = 6258629632.0 step = 19000: loss = 8091572224.0 step = 19000: Average Return = 200.0 step = 19200: loss = 3860335616.0 step = 19400: loss = 3552561152.0 step = 19600: loss = 4175943424.0 step = 19800: loss = 5975838720.0 step = 20000: loss = 4709884928.0 step = 20000: Average Return = 200.0
görselleştirme
araziler
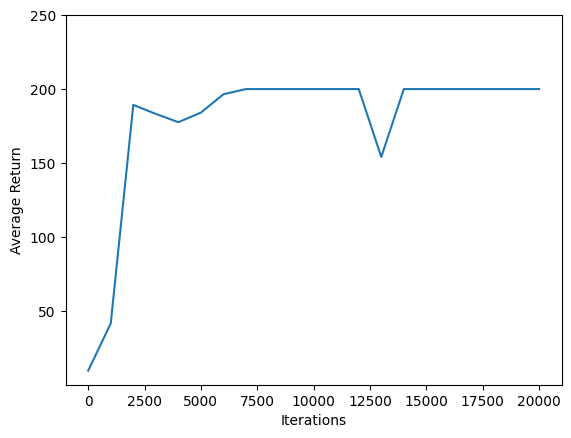
Kullanım matplotlib.pyplot politika eğitimi sırasında ne kadar geliştiğini grafiğini oluşturmak.
Bir yineleme Cartpole-v0 200 sefer adımdan oluşur. Çevre bir mükafat verir +1 tek bölüm için maksimum dönüş 200 çizelgeleri gösterileri o maksimum doğru o eğitim sırasında değerlendirilir her seferinde artan getiri yani, her adım için kutup kalır yukarı. (Biraz kararsız olabilir ve her seferinde monoton artmaz.)
iterations = range(0, num_iterations + 1, eval_interval)
plt.plot(iterations, returns)
plt.ylabel('Average Return')
plt.xlabel('Iterations')
plt.ylim(top=250)
(40.82000160217285, 250.0)
Videolar
Grafikler güzel. Ancak daha heyecan verici olan, bir aracının bir ortamda gerçekten bir görevi yerine getirdiğini görmektir.
İlk olarak, videoları not defterine gömmek için bir işlev oluşturun.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
Şimdi temsilciyle birlikte Cartpole oyununun birkaç bölümünü yineleyin. Altta yatan Python ortam (TensorFlow çevre sarıcı "içinde" bir) içerir render() çevre durumunun bir resim üretir yöntemi. Bunlar bir videoda toplanabilir.
def create_policy_eval_video(policy, filename, num_episodes=5, fps=30):
filename = filename + ".mp4"
with imageio.get_writer(filename, fps=fps) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
return embed_mp4(filename)
create_policy_eval_video(agent.policy, "trained-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55d99fdf83c0] Warning: data is not aligned! This can lead to a speed loss
Eğlenmek için, eğitimli aracıyı (yukarıda) rastgele hareket eden bir aracıyla karşılaştırın. (O da yapmaz.)
create_policy_eval_video(random_policy, "random-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55ffa7fe73c0] Warning: data is not aligned! This can lead to a speed loss