
Авторские права 2021 Авторы TF-Agents.
| | |  Посмотреть исходный код на GitHub Посмотреть исходный код на GitHub | |
Вступление
Этот пример показывает , как дрессировать DQN (Deep Q Networks) агента на окружающую среду Cartpole с использованием библиотеки TF-агентов.

Он проведет вас через все компоненты конвейера обучения с подкреплением (RL) для обучения, оценки и сбора данных.
Чтобы запустить этот код в реальном времени, щелкните ссылку «Запустить в Google Colab» выше.
Настраивать
Если вы не установили следующие зависимости, запустите:
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agents[reverb]pip install pyglet
from __future__ import absolute_import, division, print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import PIL.Image
import pyvirtualdisplay
import reverb
import tensorflow as tf
from tf_agents.agents.dqn import dqn_agent
from tf_agents.drivers import py_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import sequential
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.trajectories import trajectory
from tf_agents.specs import tensor_spec
from tf_agents.utils import common
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
tf.version.VERSION
'2.6.0'
Гиперпараметры
num_iterations = 20000 # @param {type:"integer"}
initial_collect_steps = 100 # @param {type:"integer"}
collect_steps_per_iteration = 1# @param {type:"integer"}
replay_buffer_max_length = 100000 # @param {type:"integer"}
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
log_interval = 200 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
Среда
В обучении с подкреплением (RL) среда представляет собой задачу или проблему, которую необходимо решить. Стандартные среды могут быть созданы в TF-агентах с использованием tf_agents.environments люксов. У TF-Agents есть наборы для загрузки сред из таких источников, как OpenAI Gym, Atari и DM Control.
Загрузите среду CartPole из пакета OpenAI Gym.
env_name = 'CartPole-v0'
env = suite_gym.load(env_name)
Вы можете визуализировать эту среду, чтобы увидеть, как она выглядит. К тележке прикреплен свободно качающийся шест. Цель состоит в том, чтобы переместить тележку вправо или влево, чтобы столб оставался направленным вверх.
env.reset()
PIL.Image.fromarray(env.render())
environment.step метод принимает action в окружающей среде , и возвращает TimeStep кортеж , содержащий следующее наблюдение окружающей среды и вознаграждение за акцию.
time_step_spec() метод возвращает спецификации для TimeStep кортежа. Его observation атрибуты показывают форму наблюдений, типов данных и диапазоны допустимых значений. reward атрибут показывает одни и те же детали для награды.
print('Observation Spec:')
print(env.time_step_spec().observation)
Observation Spec:
BoundedArraySpec(shape=(4,), dtype=dtype('float32'), name='observation', minimum=[-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38], maximum=[4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38])
print('Reward Spec:')
print(env.time_step_spec().reward)
Reward Spec:
ArraySpec(shape=(), dtype=dtype('float32'), name='reward')
action_spec() метод возвращает форму, типы данных, и допустимые значения допустимых действий.
print('Action Spec:')
print(env.action_spec())
Action Spec:
BoundedArraySpec(shape=(), dtype=dtype('int64'), name='action', minimum=0, maximum=1)
В среде Cartpole:
-
observationпредставляет собой массив из 4 -х поплавков:- положение и скорость тележки
- угловое положение и скорость полюса
-
rewardявляется значением с плавающей точкой скалярной -
actionявляется скалярным целым с двумя возможными значениями:-
0- «шаг влево» -
1- «шаг вправо»
-
time_step = env.reset()
print('Time step:')
print(time_step)
action = np.array(1, dtype=np.int32)
next_time_step = env.step(action)
print('Next time step:')
print(next_time_step)
Time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02109759, -0.00062286, 0.04167245, -0.03825747], dtype=float32),
'reward': array(0., dtype=float32),
'step_type': array(0, dtype=int32)})
Next time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02111005, 0.1938775 , 0.0409073 , -0.31750655], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)})
Обычно создаются две среды: одна для обучения, а другая - для оценки.
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
Среда Cartpole, как и большинство других сред, написана на чистом Python. Это превращается в TensorFlow используя TFPyEnvironment обертку.
API исходной среды использует массивы Numpy. В TFPyEnvironment новообращенных эти в Tensors , чтобы сделать его совместимым с Tensorflow агентов и политикой.
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
Агент
Алгоритм , используемый для решения проблемы RL представлен в Agent . TF-агенты обеспечивают стандартные реализации различных Agents , в том числе:
Агент DQN можно использовать в любой среде с дискретным пространством действий.
В сердце DQN агента является QNetwork , модель нейронной сети , которая может научиться предсказывать QValues (ожидаемая доходность) для всех действий, учитывая наблюдение из окружающей среды.
Мы будем использовать tf_agents.networks. создать QNetwork . Сеть будет состоять из последовательности tf.keras.layers.Dense слоев, где конечный слой будет иметь 1 выход для каждого возможного действия.
fc_layer_params = (100, 50)
action_tensor_spec = tensor_spec.from_spec(env.action_spec())
num_actions = action_tensor_spec.maximum - action_tensor_spec.minimum + 1
# Define a helper function to create Dense layers configured with the right
# activation and kernel initializer.
def dense_layer(num_units):
return tf.keras.layers.Dense(
num_units,
activation=tf.keras.activations.relu,
kernel_initializer=tf.keras.initializers.VarianceScaling(
scale=2.0, mode='fan_in', distribution='truncated_normal'))
# QNetwork consists of a sequence of Dense layers followed by a dense layer
# with `num_actions` units to generate one q_value per available action as
# its output.
dense_layers = [dense_layer(num_units) for num_units in fc_layer_params]
q_values_layer = tf.keras.layers.Dense(
num_actions,
activation=None,
kernel_initializer=tf.keras.initializers.RandomUniform(
minval=-0.03, maxval=0.03),
bias_initializer=tf.keras.initializers.Constant(-0.2))
q_net = sequential.Sequential(dense_layers + [q_values_layer])
Теперь используйте tf_agents.agents.dqn.dqn_agent для создания экземпляра DqnAgent . В дополнении к time_step_spec , action_spec и QNetwork, конструктор агента также требует оптимизатора (в данном случае, AdamOptimizer ), функции потерь, и целое число счетчика шагов.
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = dqn_agent.DqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
q_network=q_net,
optimizer=optimizer,
td_errors_loss_fn=common.element_wise_squared_loss,
train_step_counter=train_step_counter)
agent.initialize()
Политики
Политика определяет способ действий агента в среде. Обычно цель обучения с подкреплением состоит в том, чтобы тренировать базовую модель до тех пор, пока политика не приведет к желаемому результату.
В этом руководстве:
- Желаемый результат - удерживать шест в вертикальном положении над тележкой.
- Политика возвращает действие (влево или вправо) для каждого
time_stepнаблюдения.
Агенты содержат две политики:
-
agent.policy- Основная политика , которая используется для оценки и развертывания. -
agent.collect_policy- Вторая политика , которая используется для сбора данных.
eval_policy = agent.policy
collect_policy = agent.collect_policy
Политики можно создавать независимо от агентов. Например, можно использовать tf_agents.policies.random_tf_policy создать политику , которая будет случайным образом выбрать действие для каждого time_step .
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
Для того, чтобы получить действие от политики, вызовите policy.action(time_step) метод. time_step содержит наблюдение из окружающей среды. Этот метод возвращает PolicyStep , который именованный кортеж с тремя компонентами:
-
action- действие , которые необходимо принять (в данном случае,0или1) -
state- используется для отслеживания состояния (то есть, РННЫ основы) политик -
info- вспомогательные данные, такие как лог вероятности действий
example_environment = tf_py_environment.TFPyEnvironment(
suite_gym.load('CartPole-v0'))
time_step = example_environment.reset()
random_policy.action(time_step)
PolicyStep(action=<tf.Tensor: shape=(1,), dtype=int64, numpy=array([1])>, state=(), info=())
Метрики и оценка
Наиболее распространенный показатель, используемый для оценки политики, - это средний доход. Возврат - это сумма вознаграждений, полученных при выполнении политики в среде для эпизода. Запускается несколько серий, что дает средний доход.
Следующая функция вычисляет средний доход от политики, учитывая политику, среду и количество эпизодов.
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
# See also the metrics module for standard implementations of different metrics.
# https://github.com/tensorflow/agents/tree/master/tf_agents/metrics
Выполнение этого вычисления на random_policy показывает базовые характеристики в окружающей среде.
compute_avg_return(eval_env, random_policy, num_eval_episodes)
20.7
Буфер воспроизведения
Для того , чтобы отслеживать данные , собранные из окружающей среды, мы будем использовать Reverb , эффективный, расширяемый и простой в использовании системы воспроизведения с помощью Deepmind. Он хранит данные об опыте, когда мы собираем траектории, и потребляется во время обучения.
Этот буфер воспроизведения создается с использованием спецификаций, описывающих тензоры, которые должны быть сохранены, которые могут быть получены от агента с помощью agent.collect_data_spec.
table_name = 'uniform_table'
replay_buffer_signature = tensor_spec.from_spec(
agent.collect_data_spec)
replay_buffer_signature = tensor_spec.add_outer_dim(
replay_buffer_signature)
table = reverb.Table(
table_name,
max_size=replay_buffer_max_length,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1),
signature=replay_buffer_signature)
reverb_server = reverb.Server([table])
replay_buffer = reverb_replay_buffer.ReverbReplayBuffer(
agent.collect_data_spec,
table_name=table_name,
sequence_length=2,
local_server=reverb_server)
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
replay_buffer.py_client,
table_name,
sequence_length=2)
[reverb/cc/platform/tfrecord_checkpointer.cc:150] Initializing TFRecordCheckpointer in /tmp/tmpcz7e0i7c. [reverb/cc/platform/tfrecord_checkpointer.cc:385] Loading latest checkpoint from /tmp/tmpcz7e0i7c [reverb/cc/platform/default/server.cc:71] Started replay server on port 21909
Для большинства агентов, collect_data_spec именованный кортеж называется Trajectory , содержащий спецификации для наблюдения, действия, награды и другие предметы.
agent.collect_data_spec
Trajectory(
{'action': BoundedTensorSpec(shape=(), dtype=tf.int64, name='action', minimum=array(0), maximum=array(1)),
'discount': BoundedTensorSpec(shape=(), dtype=tf.float32, name='discount', minimum=array(0., dtype=float32), maximum=array(1., dtype=float32)),
'next_step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'observation': BoundedTensorSpec(shape=(4,), dtype=tf.float32, name='observation', minimum=array([-4.8000002e+00, -3.4028235e+38, -4.1887903e-01, -3.4028235e+38],
dtype=float32), maximum=array([4.8000002e+00, 3.4028235e+38, 4.1887903e-01, 3.4028235e+38],
dtype=float32)),
'policy_info': (),
'reward': TensorSpec(shape=(), dtype=tf.float32, name='reward'),
'step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type')})
agent.collect_data_spec._fields
('step_type',
'observation',
'action',
'policy_info',
'next_step_type',
'reward',
'discount')
Сбор данных
Теперь выполните в среде несколько шагов случайную политику, записав данные в буфер воспроизведения.
Здесь мы используем PyDriver для запуска цикла сбора опыта. Вы можете узнать больше о драйвере ТФА агентов в нашем водителях учебнике .
py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
random_policy, use_tf_function=True),
[rb_observer],
max_steps=initial_collect_steps).run(train_py_env.reset())
(TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([ 0.04100575, 0.16847703, -0.12718087, -0.6300714 ], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)}),
())
Буфер воспроизведения теперь представляет собой набор траекторий.
# For the curious:
# Uncomment to peel one of these off and inspect it.
# iter(replay_buffer.as_dataset()).next()
Агенту нужен доступ к буферу воспроизведения. Это обеспечивается за счет создания Iterable tf.data.Dataset трубопровода , который будет кормить данные к агенту.
Каждая строка буфера воспроизведения хранит только один шаг наблюдения. Но так как DQN агент необходимо как текущее и следующее наблюдение для вычисления потерь, трубопровод будет набор данных выборка два соседних строк для каждого элемента в пакете ( num_steps=2 ).
Этот набор данных также оптимизируется за счет выполнения параллельных вызовов и предварительной выборки данных.
# Dataset generates trajectories with shape [Bx2x...]
dataset = replay_buffer.as_dataset(
num_parallel_calls=3,
sample_batch_size=batch_size,
num_steps=2).prefetch(3)
dataset
<PrefetchDataset shapes: (Trajectory(
{action: (64, 2),
discount: (64, 2),
next_step_type: (64, 2),
observation: (64, 2, 4),
policy_info: (),
reward: (64, 2),
step_type: (64, 2)}), SampleInfo(key=(64, 2), probability=(64, 2), table_size=(64, 2), priority=(64, 2))), types: (Trajectory(
{action: tf.int64,
discount: tf.float32,
next_step_type: tf.int32,
observation: tf.float32,
policy_info: (),
reward: tf.float32,
step_type: tf.int32}), SampleInfo(key=tf.uint64, probability=tf.float64, table_size=tf.int64, priority=tf.float64))>
iterator = iter(dataset)
print(iterator)
<tensorflow.python.data.ops.iterator_ops.OwnedIterator object at 0x7f3cec38cd90>
# For the curious:
# Uncomment to see what the dataset iterator is feeding to the agent.
# Compare this representation of replay data
# to the collection of individual trajectories shown earlier.
# iterator.next()
Обучение агента
Во время цикла обучения должны произойти две вещи:
- собирать данные из окружающей среды
- использовать эти данные для обучения нейронной сети (сетей) агента
В этом примере также периодически оценивается политика и выводится текущая оценка.
Выполнение следующего займет ~ 5 минут.
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step.
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
# Reset the environment.
time_step = train_py_env.reset()
# Create a driver to collect experience.
collect_driver = py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
agent.collect_policy, use_tf_function=True),
[rb_observer],
max_steps=collect_steps_per_iteration)
for _ in range(num_iterations):
# Collect a few steps and save to the replay buffer.
time_step, _ = collect_driver.run(time_step)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience).loss
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/util/dispatch.py:206: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. step = 200: loss = 27.080341339111328 step = 400: loss = 3.0314550399780273 step = 600: loss = 470.9187927246094 step = 800: loss = 548.7870483398438 step = 1000: loss = 4315.17578125 step = 1000: Average Return = 48.400001525878906 step = 1200: loss = 5297.24853515625 step = 1400: loss = 11601.296875 step = 1600: loss = 60482.578125 step = 1800: loss = 802764.8125 step = 2000: loss = 1689283.0 step = 2000: Average Return = 63.400001525878906 step = 2200: loss = 4928921.0 step = 2400: loss = 5508345.0 step = 2600: loss = 17888162.0 step = 2800: loss = 23993148.0 step = 3000: loss = 10192765.0 step = 3000: Average Return = 74.0999984741211 step = 3200: loss = 88318176.0 step = 3400: loss = 77485728.0 step = 3600: loss = 3236693504.0 step = 3800: loss = 102289840.0 step = 4000: loss = 168594496.0 step = 4000: Average Return = 73.5999984741211 step = 4200: loss = 348990528.0 step = 4400: loss = 101819664.0 step = 4600: loss = 136486208.0 step = 4800: loss = 133454864.0 step = 5000: loss = 592934784.0 step = 5000: Average Return = 71.5999984741211 step = 5200: loss = 216909120.0 step = 5400: loss = 181369648.0 step = 5600: loss = 600455680.0 step = 5800: loss = 551183744.0 step = 6000: loss = 368749824.0 step = 6000: Average Return = 83.5 step = 6200: loss = 1010418176.0 step = 6400: loss = 171257856.0 step = 6600: loss = 115424904.0 step = 6800: loss = 144941152.0 step = 7000: loss = 257932752.0 step = 7000: Average Return = 107.0 step = 7200: loss = 854109248.0 step = 7400: loss = 95970128.0 step = 7600: loss = 325583744.0 step = 7800: loss = 858134016.0 step = 8000: loss = 197960128.0 step = 8000: Average Return = 124.19999694824219 step = 8200: loss = 310187552.0 step = 8400: loss = 572293760.0 step = 8600: loss = 2338323456.0 step = 8800: loss = 384659392.0 step = 9000: loss = 676924544.0 step = 9000: Average Return = 200.0 step = 9200: loss = 946199168.0 step = 9400: loss = 605189504.0 step = 9600: loss = 768988928.0 step = 9800: loss = 508231776.0 step = 10000: loss = 526518016.0 step = 10000: Average Return = 200.0 step = 10200: loss = 1461528704.0 step = 10400: loss = 709822016.0 step = 10600: loss = 2770553344.0 step = 10800: loss = 496421504.0 step = 11000: loss = 1822116864.0 step = 11000: Average Return = 200.0 step = 11200: loss = 744854208.0 step = 11400: loss = 778800384.0 step = 11600: loss = 667049216.0 step = 11800: loss = 586587648.0 step = 12000: loss = 2586833920.0 step = 12000: Average Return = 200.0 step = 12200: loss = 1002041472.0 step = 12400: loss = 1526919552.0 step = 12600: loss = 1670877056.0 step = 12800: loss = 1857608704.0 step = 13000: loss = 1040727936.0 step = 13000: Average Return = 200.0 step = 13200: loss = 1807798656.0 step = 13400: loss = 1457996544.0 step = 13600: loss = 1322671616.0 step = 13800: loss = 22940983296.0 step = 14000: loss = 1556422912.0 step = 14000: Average Return = 200.0 step = 14200: loss = 2488473600.0 step = 14400: loss = 46558289920.0 step = 14600: loss = 1958968960.0 step = 14800: loss = 4677744640.0 step = 15000: loss = 1648418304.0 step = 15000: Average Return = 200.0 step = 15200: loss = 46132723712.0 step = 15400: loss = 2189093888.0 step = 15600: loss = 1204941056.0 step = 15800: loss = 1578462080.0 step = 16000: loss = 1695949312.0 step = 16000: Average Return = 200.0 step = 16200: loss = 19554553856.0 step = 16400: loss = 2857277184.0 step = 16600: loss = 5782225408.0 step = 16800: loss = 2294467072.0 step = 17000: loss = 2397877248.0 step = 17000: Average Return = 200.0 step = 17200: loss = 2910329088.0 step = 17400: loss = 6317301760.0 step = 17600: loss = 2733602048.0 step = 17800: loss = 32502740992.0 step = 18000: loss = 6295858688.0 step = 18000: Average Return = 200.0 step = 18200: loss = 2564860160.0 step = 18400: loss = 76450430976.0 step = 18600: loss = 6347636736.0 step = 18800: loss = 6258629632.0 step = 19000: loss = 8091572224.0 step = 19000: Average Return = 200.0 step = 19200: loss = 3860335616.0 step = 19400: loss = 3552561152.0 step = 19600: loss = 4175943424.0 step = 19800: loss = 5975838720.0 step = 20000: loss = 4709884928.0 step = 20000: Average Return = 200.0
Визуализация
Сюжеты
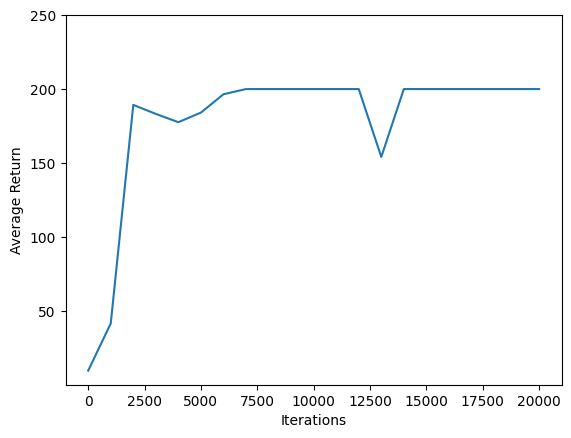
Использование matplotlib.pyplot картировать как политика улучшилась во время тренировки.
Одна итерация Cartpole-v0 состоит из 200 шагов по времени. Среда дает награду +1 для каждого шага полюсного пребывания, так что максимальный возврат в течение одного эпизода 200. графики показывают возвращение увеличиваясь к этому максимуму каждый раз , когда он вычисляется во время тренировки. (Он может быть немного нестабильным и не увеличиваться монотонно каждый раз.)
iterations = range(0, num_iterations + 1, eval_interval)
plt.plot(iterations, returns)
plt.ylabel('Average Return')
plt.xlabel('Iterations')
plt.ylim(top=250)
(40.82000160217285, 250.0)
Видео
Графики хороши. Но еще интереснее видеть, как агент действительно выполняет задачу в среде.
Сначала создайте функцию для встраивания видео в блокнот.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
Теперь пройдите через несколько эпизодов игры Cartpole с агентом. , Лежащая в основе среда Python (один «внутри» окружающей среды обертки TensorFlow) обеспечивает render() метод, который выводит изображение состояния окружающей среды. Их можно собрать в видео.
def create_policy_eval_video(policy, filename, num_episodes=5, fps=30):
filename = filename + ".mp4"
with imageio.get_writer(filename, fps=fps) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
return embed_mp4(filename)
create_policy_eval_video(agent.policy, "trained-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55d99fdf83c0] Warning: data is not aligned! This can lead to a speed loss
Ради интереса сравните обученного агента (см. Выше) с агентом, перемещающимся случайным образом. (Это не так.)
create_policy_eval_video(random_policy, "random-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55ffa7fe73c0] Warning: data is not aligned! This can lead to a speed loss